
طراحی و ساخت عملگر
شرکت آریا فرتاک نویان با بیش از ۵ سال تجربه طراحی و ساخت انواع عملگر در صنایع مختلف آمادگی طراحی و ساخت عملگرهای الکترومکانیکی و نیوماتیک را دارا می باشد. شرکت آریا فرتاک نویان با آشنایی با استانداردهای نفت و گاز توانایی بکار گیری از تجهیزات مناسب با استانداردهای EX برای مناطق Hazard را دارا می باشد. این شرکت در طراحی های Ex خود از سروو موتورهای Exd و سنسور مکان intrinsically safe همراه barrier مناسب استفاده می نماید و با استفاده از کابل مناسب و گلند Exd، کل لوپ و مسیر را از لحاظ Ex تضمین می نماید. محاسبات برای انتخاب موتور مناسب به صورت کامل صورت میگیرد.
1- بررسی سیستمهای کنترلی عملگر
از آنجا که حرکت Ball Screw در سیستمهای عملگر خطی است میتوان برای شناسایی جایگاه و داشتن فیدبک هر لحظه آن در سیستم کنترل از انکدر، سروو درایور و سروو موتورهای مختلفی استفاده نمود. برای این منظور باید کارایی این سروو درایور و سروو موتورها در سیستمهای مختلف بررسی شوند. مثالهای کاربردی و مدل شرکت پارکر(قابل استفاده برای هر کاربرد)بیان میشود.
1-1- سیستم برشزنی
در شکل 1 یک سیستم کنترل حلقه بسته مشاهده میشود. در اینگونه سیستمها معمولا فیدبک ارسالی از موتور به درایور سرعت است که در اینجا همانطور که در شکل 1 مشاهده میشود فیدبک مکان نیز از موتور به درایور میرود که دلیل آن قابلیت اطمینان و دقت بالاتر برای سیستم است و وجود انکدر در انتهای سیستم نیز سیستم برش را فعال میکند.
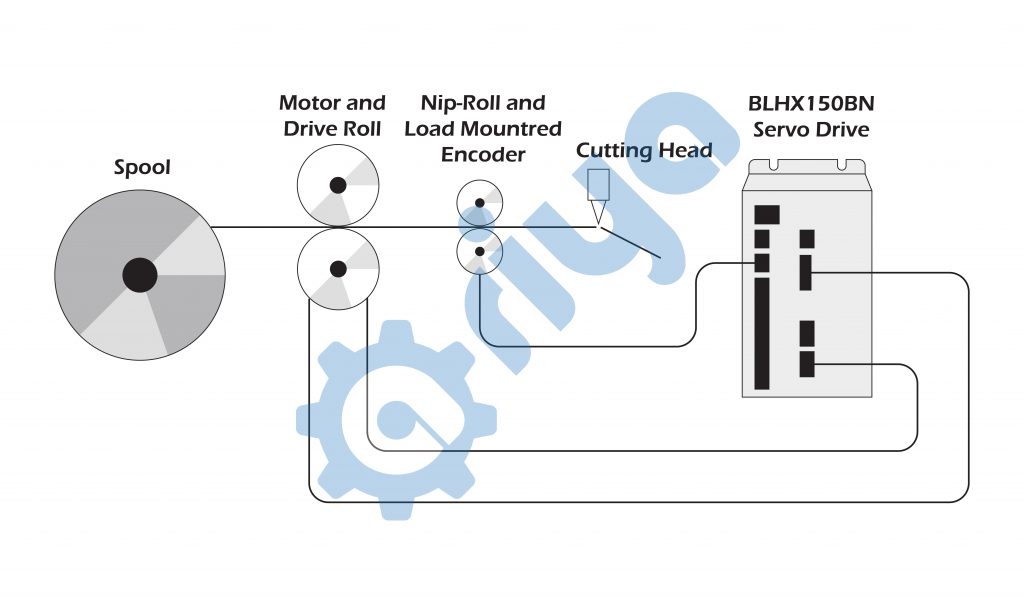
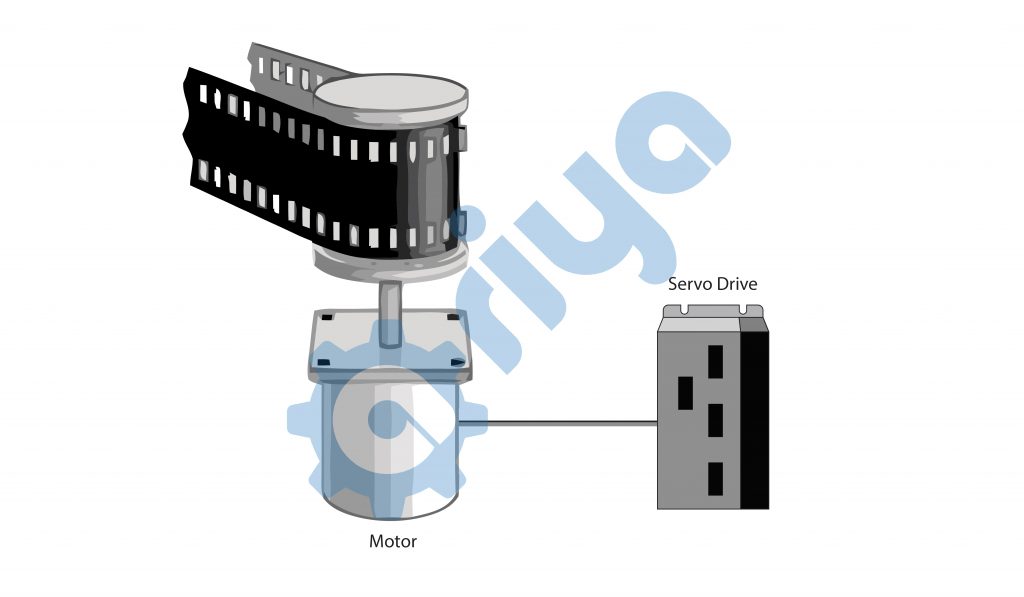
این درایورها انعطافپذیری زیادی از نظر طراحی مکانیکی دارند و دقت بسیار بالایی دارند (البته مقدار بسیار جزئی بازگشت دارند) در این کاربرد فریمهای مختلف با کنترل مناسب درایور برای تولید فیلم به حرکت در میآید. شتاب سروو، اینرسی برای حرکت هر فریم و گشتاور لازم محاسبه خواهد شد. مدل پیشنهادی شرکت پارکر در این کاربرد درایور SX و موتور S57-51-MO میباشد.
1-3- جوشکاری متحرک
در این کاربرد که قسمتی از فرآیند ساخت یک قطعه است، تسمه حمل محصولات با سرعت نامشخص حرکت داده میشود. روی هر قطعه باید دو نقطه جوش داده شود که فاصله آنها 4 اینچ میباشد و جوشکاری هر نقطه یک ثانیه طول میکشد. در این فرآیند لازم است که کار هر سیستم مجزا و مستقل باشد و مکان دستگاه جوش دهنده مطابق با مکان و سرعت هر قطعه باشد. جوشکاری طبق شکل 3 باید بدون توقف تسمه حمل صورت گیرد. برای کنترل حرکت بدون توقف نیاز به ورودی و خروجیهای قابل برنامهریزی و برنامه قابل ذخیره برای فرآیند، سرعت و شتاب خطی بالا میباشد.
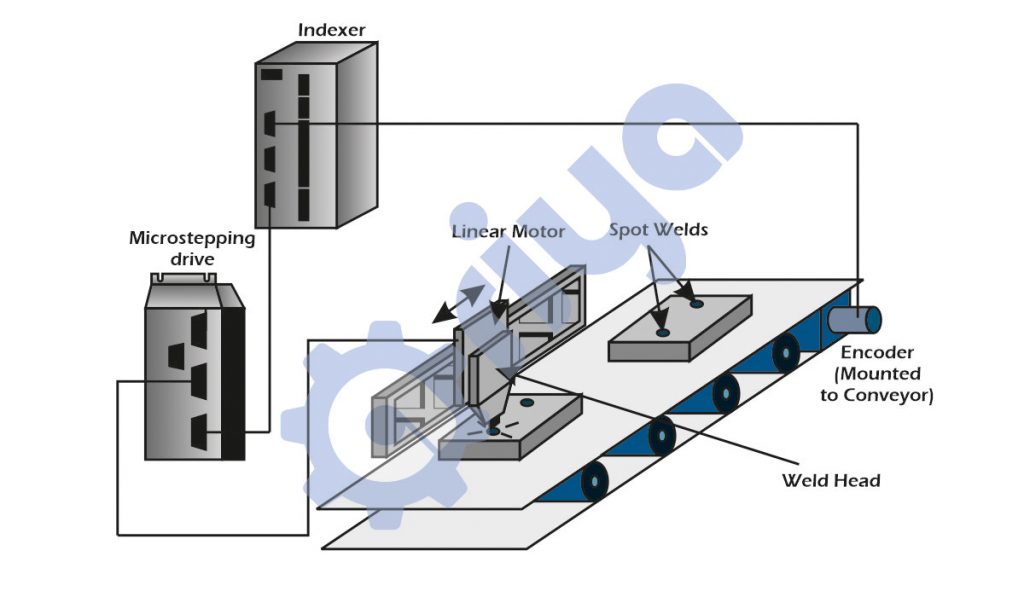
کنترلر از طریق Indexer سرعت و مکان باند را به وسیله انکدری که به انتهای باند متصل میباشد، دریافت میکند. انکدر به درایور اولیه متصل میباشد و موتور خطی که به منظور حرکت دادن دستگاه جوشکاری میباشد از درایور اصلی فرمان میگیرد. موتور پله ای خطی که برای حرکت قسمت جوشکاری استفاده میشود محدودیتهای سرعت و گشتاور در حرکت دایرهای نوار نقاله را نخواهد داشت و از آنجا که نیروی این موتور مستقیما به دستگاه جوشکاری متصل میشود طول نوار نقاله (که باعث افزایش اینرسی و نیروی حرکتی میشود) تاثیری در کارکرد دستگاه ندارد.
1-4- تست استتند موتور
در تولید موتور جت برای اندازهگیریهای عملکردی موتور جت نیاز به سیستمی برای تست میباشد. جریان سوخت 4 مسیر باید از راه دور کنترل و تنظیم شود و حرکت چرخشی نیاز به رزولوشن 1 درجهای دارد.حرکت موتورهای مورد نیاز برای کنترل دریچهها باید آرام و با اینرسی بسیار پایین باشد و گشتاور اصلی باید به راحتی بر اصتکاک شیر غلبه کند. از نیازمندیهای درایور برای این سیستم قابلیت کنترل در سرعت پایین می باشد.
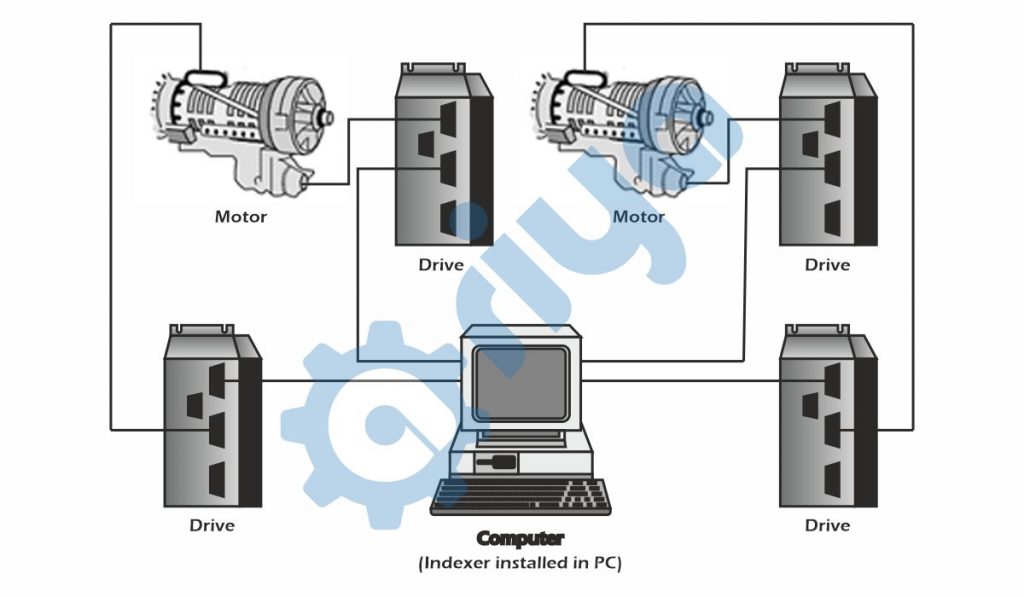
در سیستم نشان داده شده در شکل 4 گشتاور شیرهای سوخت توسط درایور اندازهگیری شده و اپراتور نیز موقعیت شیرها بر حسب 0 تا 360 درجه را خواهد دید. زاویه شیرها در حالت کارکرد عادی باید مشخص باشد. سیستم پیشنهادی پارکر درایور S Drive و موتور S57-102 میباشد.
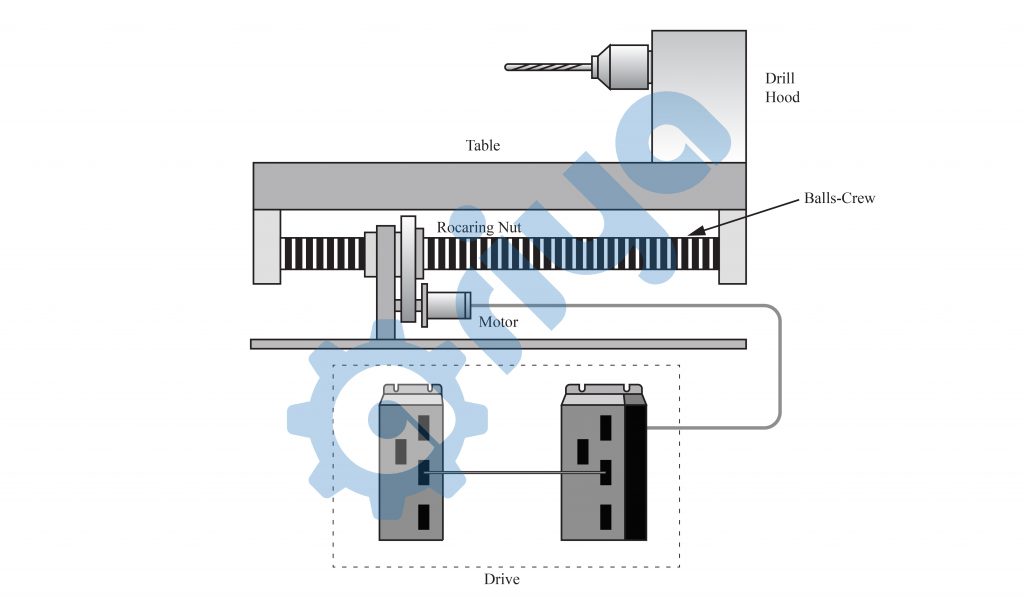
1-5- ماشین سوراخکاری
ماشین سوراخکاری باید دارای سرعت بالا باشد و برای حرکت خطی در این سیستم از Ball Screw استفاده شده است. برای حرکت Ball Screw مهره چرخانده میشود. کار ماشین انتقال ایجاد چندین سوراخ روی قطعه میباشد. موتور، درل را با سرعت بسیار زیاد روی قطعه حرکت میدهد و آن را تا عمق مورد نظر جلو میبرد. تنظیم عمق از طریق اندازهگیری گشتاور (اندازهگیری گشتاور با خواندن جریان درایور به سادگی قابل انجام است) صورت میگیرد. پس از سوراخکاری درل با سرعت زیاد برمیگردد و برای سیکل بعدی آماده میشود. از آنجا که تعمیرات موتور پر هزینه و سخت است از موتور brushless استفاده میشود. موتور پیشنهادی پارکر 606 Motor و برای درایور مدل Drive APEX6152 میباشد. این سیستم در شکل 5 قابل مشاهده است.
2- بررسی سیستمهای سروو (1)
سروو ریشه یونانی دارد و معادل انگلیسی آن servant به معنی خدمتکار است و منظور سیستمی است که فرمان دادن به آن بسیار ساده است و منظور از یک سیستم سروو سیستمی است که میتواند تجهیزات مکانیکی را از نظر مکان و سرعت کنترل نماید. شکل 6 یک مثال از سیستم سروو را نشان میدهد.

در این شکل سیستم کنترل مکان قطعه را تعیین میکند و این مکان با مکان نشان داده شده توسط انکدر مقایسه شده و هرگاه اختلاف این دو به صفر رسید سروو درایور، موتور سروو را متوقف میکند.
2-1 طرز کار سیستم تعیین مکان
تنها راه کنترل سیستمهای کنترل مکان و تعیین سرعت، سیستمهای سروو نیست ولی امروزه سیستمهای سروو اصلیترین روش کنترل اینگونه فرآیندها میباشد. شکل 7 روشهای غیر از سیستم سروو را نشان میدهد.
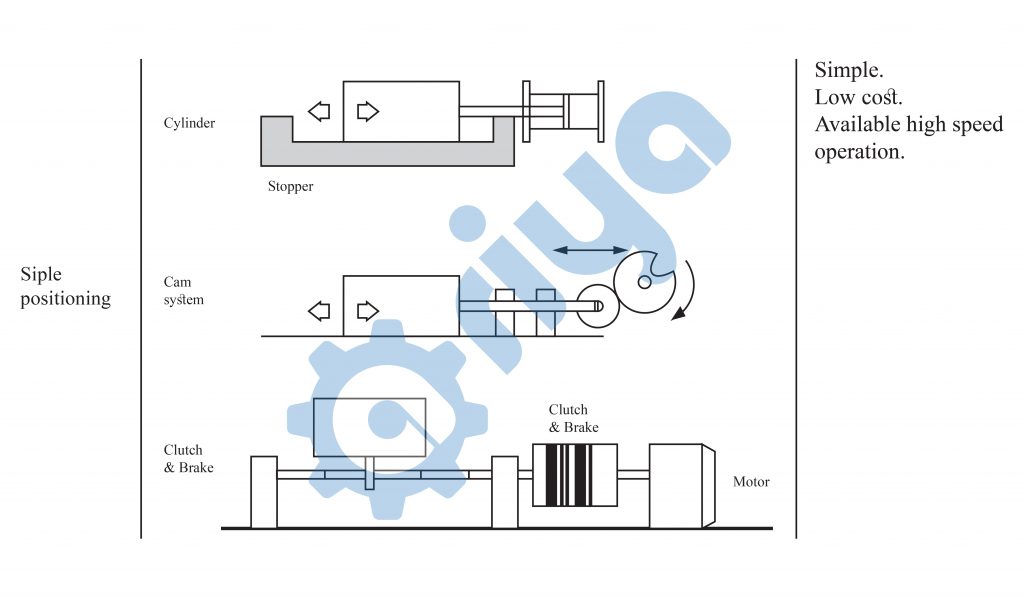
مزیت این سیستمها سادگی، قیمت پایین و سرعت بالای پاسخ سیستم میباشد. سیستمهای کنترلی سروو را میتوان به سیستم کنترل حلقه باز، نیمه حلقه بسته و تمام حلقه بسته تقسیم کرد.
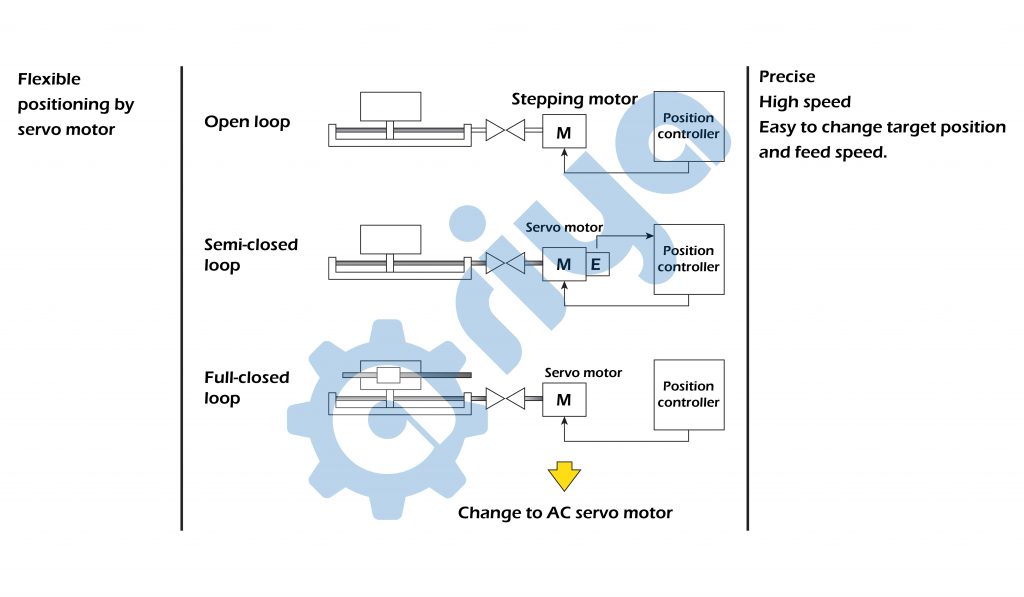
شکل 8:نمایش سیستم حلقه بسته و حلقه باز در سیستمهای کنترلی سروو
شکل 8 روشهای حلقه باز و حلقه بسته را نشان میدهد. مزیت روش تعیین مکان در سیستمهای سروو حلقه باز سرعت بالا و آسانی در تغییر مکان و سرعت و مزیت سیستمهای سروو حلقه بسته سرعت و دقت بالا میباشد.
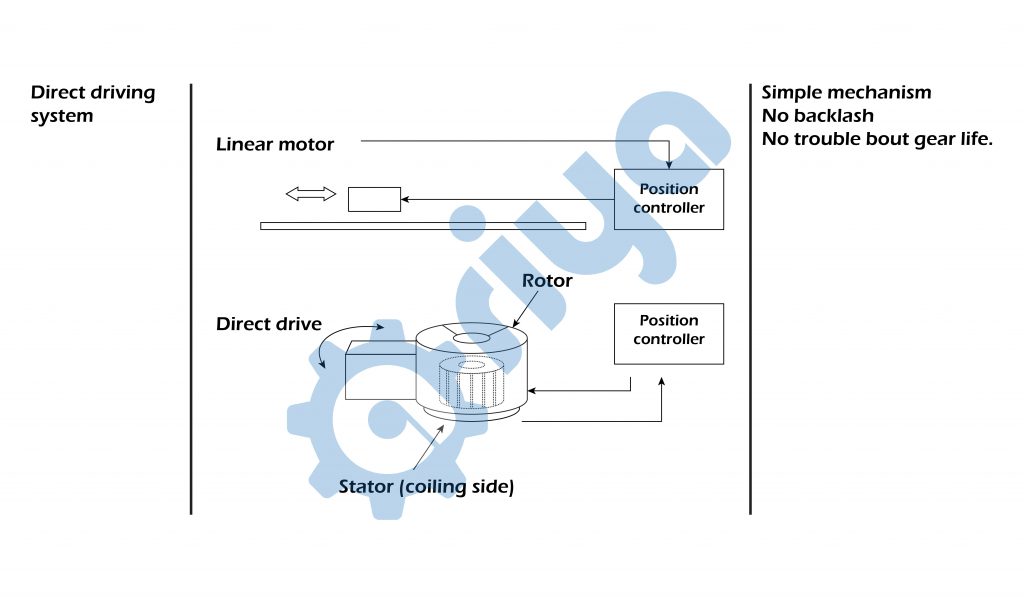
شکل 9:تقسیم بندی سیستمهای سروو از نظر کنترل حرکت و مکان خطی یا چرخشی
شکل 9 نیز یک تقسیمبندی دیگر سیستمهای سروو از نظر خطی یا حلقوی بودن را نشان میدهد.
تقریبا تمامی تجهیزات مکانیکی یک ناحیه خنثی بین حرکت مستقیم و حرکت معکوس دارند که در شکل 10 این ناحیه نشان داده شده است. همانطور که در شکل 10 نشان داده شده است یک حرکت اضافه لازم است تا این فاصله جبران شود این فاصله Backlash نامیده میشود و سیستمهای سروو تابعی دارند که میتواند این فاصله را جبران کند. در شکل 10 در پنج مرحله طریقه جبرانسازی پسزنی نمایش داده شده است. در اولین مرحله حرکت به سمت جلو میباشد و این حرکت متوقف میشود در مرحله دوم به منظور حرکت در جهت عکس(رو به عقب) N پالس توسط سیستم سروو به موتور فرستاده شده تا فاصله پسزنی جبران شود در مرحله سوم حرکت در جهت عکس شروع شده و سپس متوقف میشود و دو مرحله بعد مجددا مراحل حرکت در جهت عکس(رو به جلو) را نشان میدهد. شمارنده پالسهای مکانی پالسهای جبرانسازی را نمیشمارد.
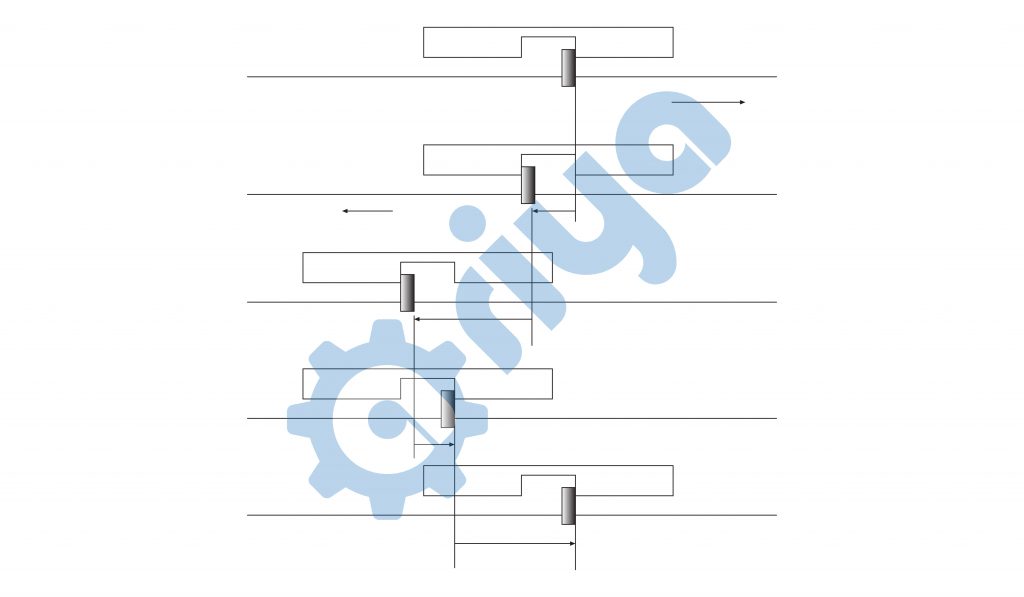
شکل 10:نمایش Backlash و طریقه جبران کردن آن
2-2-بررسی انواع سیستمهای کنترل و اجزا آن در سیستم کنترلی سروو
همانطور که گفته شد 3 نوع سیستم کنترلی وجود دارد.
1- سیستم کنترل نیمه حلقه بسته
2- سیستم کنترل حلقه بسته کامل
3- سیستم کنترلی حلقه باز.
در شکل 11 این سیستمها نمایش داده شده است.
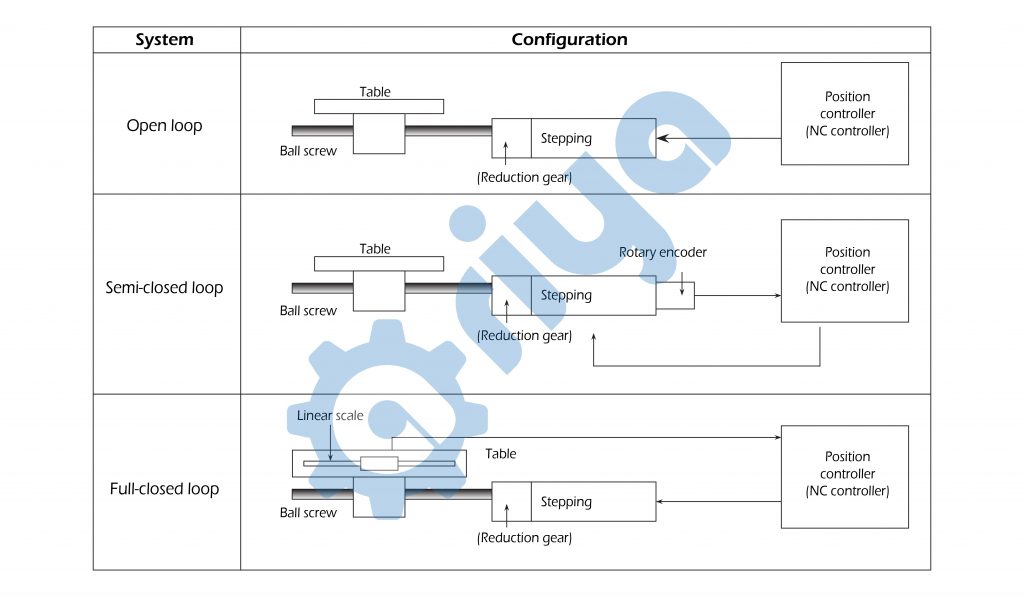
شکل 11:نمایش انواع سیستمهای کنترلی سروو
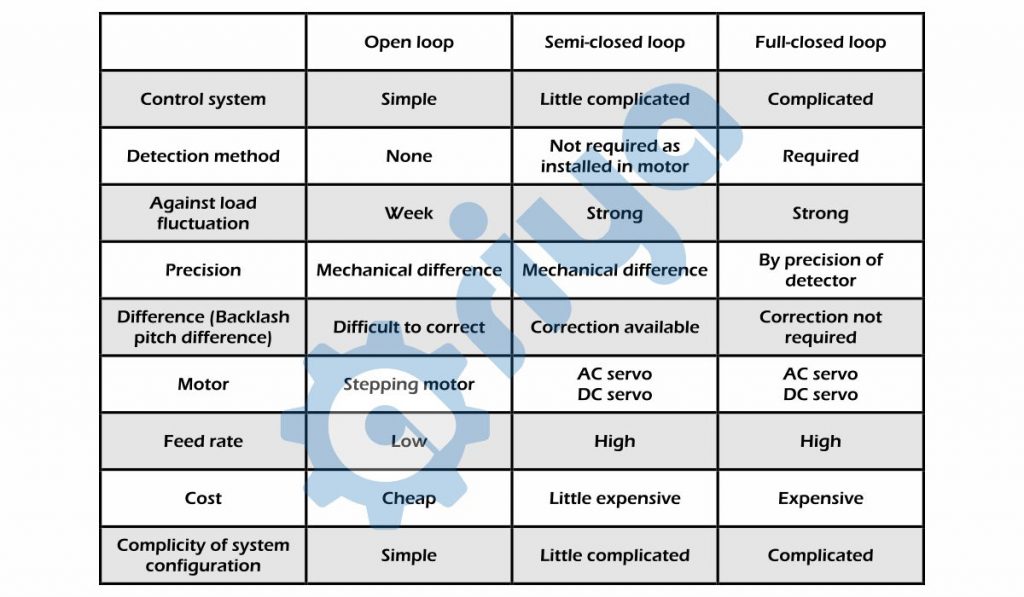
در جدول 1‑1 هر یک از این سیستمها از نظر دقت، پیچیدگی، نوع موتور، هزینه و احتیاج به نصب انکدر مقایسه شدهاند.
جدول 1‑1:مقایسه پارامترهای مختلف در سیستمهای کنترلی سروو
در شکل 12 یک روش پیکربندی برای سیستمهای سروو نمایش داده شده است.
شکل 12:یک روش پیکربندی برای سیستم کنترلی سروو
قسمتهای اصلی سیستم کنترلی سروو شامل سروو موتور، سروو درایور و انکدر است.
سروو موتور: تفاوت عمده سروو موتور در مقایسه با موتورهای القایی معمولی داشتن قسمتی به نام Detector است که وظیفه آن شناسایی سرعت و مکان موتور است.در شکل 13 قسمتهای مختلف سروو موتور نمایش داده شدهاند.
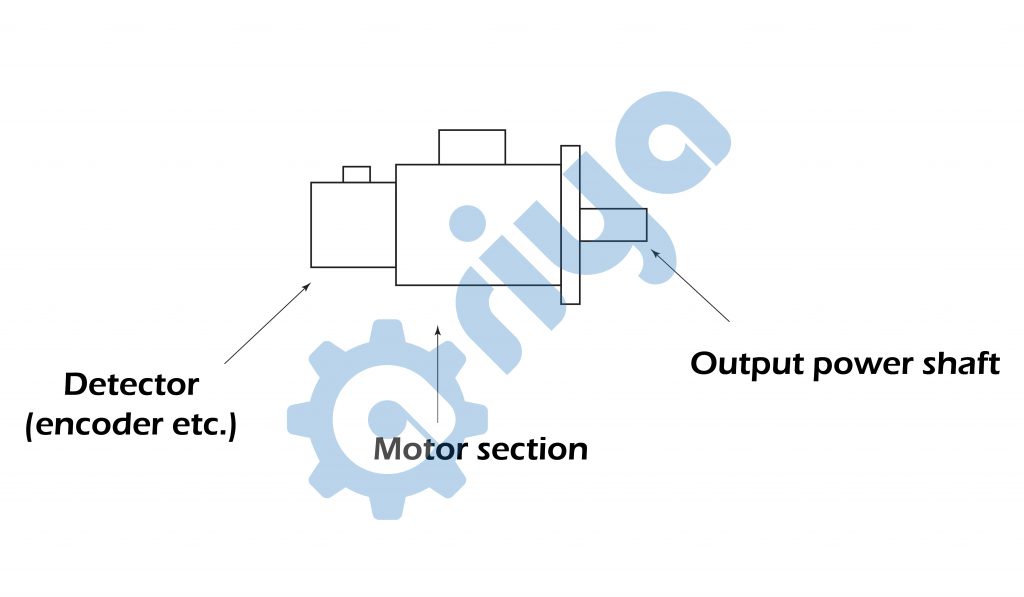
شکل 13:سروو موتور
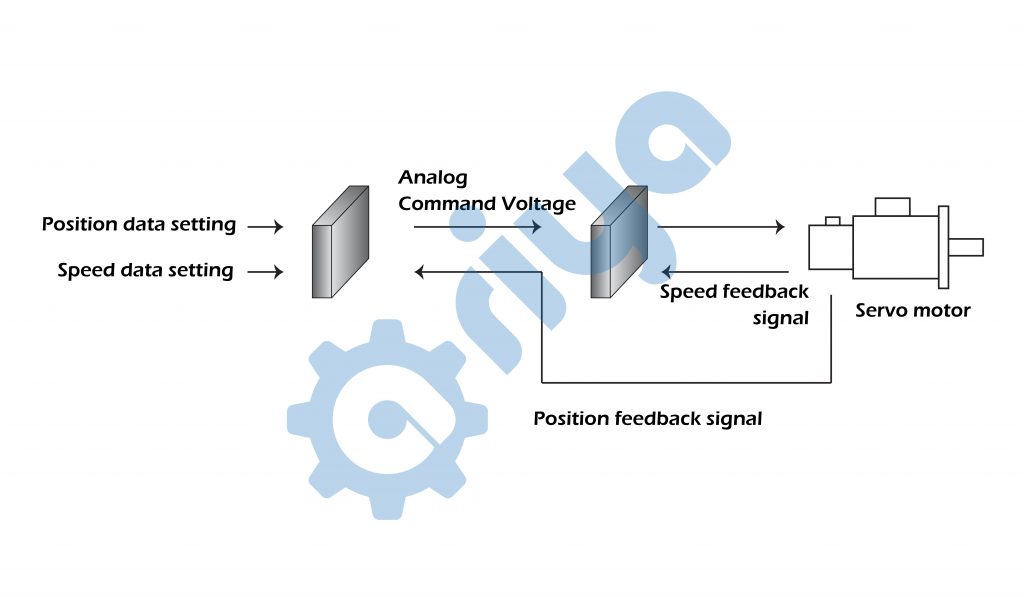
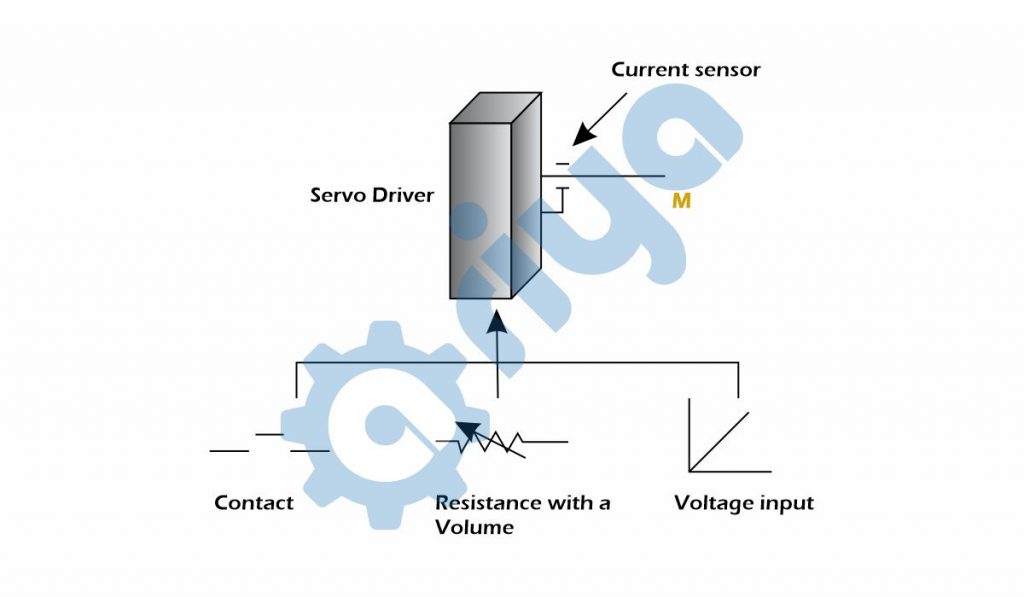
سروو درایور: سروو درایور سرعت چرخش موتور را کنترل میکند طوری که سرعت موتور متناسب با ولتاژ ورودی به درایور باشد بدین طریق میتوان سرعت موتور در هر لحظه را مانیتور کرد. شکل 14 چگونگی اتصالات و رابطه خطی سرعت با ولتاژ ورودی به درایور نشان میدهد. همانطور که در شکل 14 نشان داده شده است برای مثال اگر ولتاژ 10 ولت متناسب با سرعت 3000 دور بر دقیقه باشد ولتاژ 5- ولت متناسب با 1500 دور بر دقیقه ولی در جهت معکوس است.
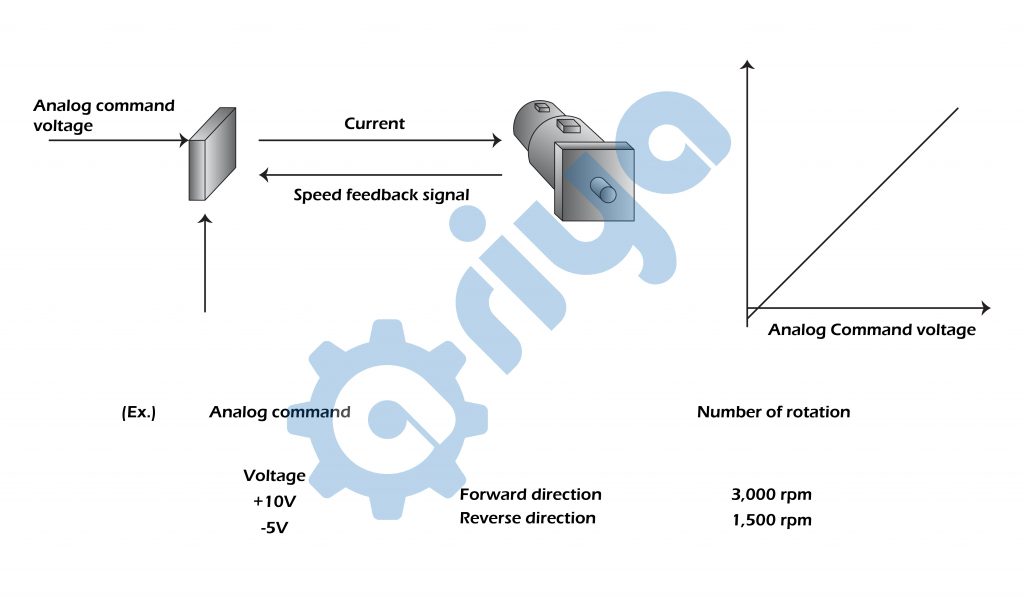
شکل 14:چگونگی تنظیم سرعت موتور توسط درایور توسط سیگنال فرمان ولتاژ آنالوگ ورودی
انکدر یا مکاننما: وظیفه ارسال سیگنال مکان موتور در هر لحظه را دارد بنابراین جهت حرکت موتور نیز در هر لحظه مانیتور میشود.
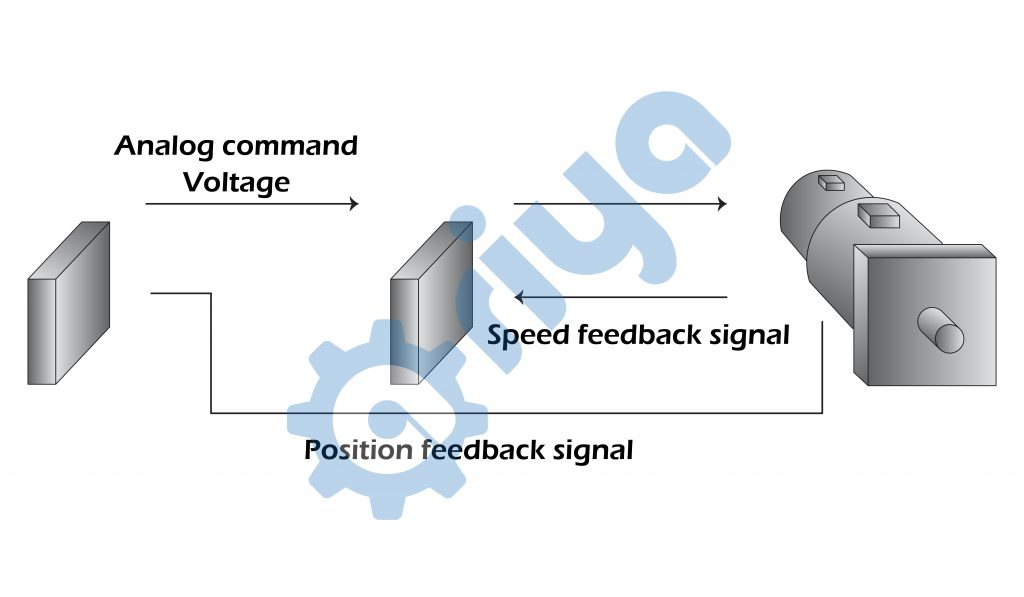
شکل 15:نمایش کاربرد انکدر در کل سیستم کنترلی سروو
در شکل 16 بلوک دیاگرام و چگونگی ارتباطات داخلی درایور و کل سیستم کنترل سروو نمایش داده شده است.
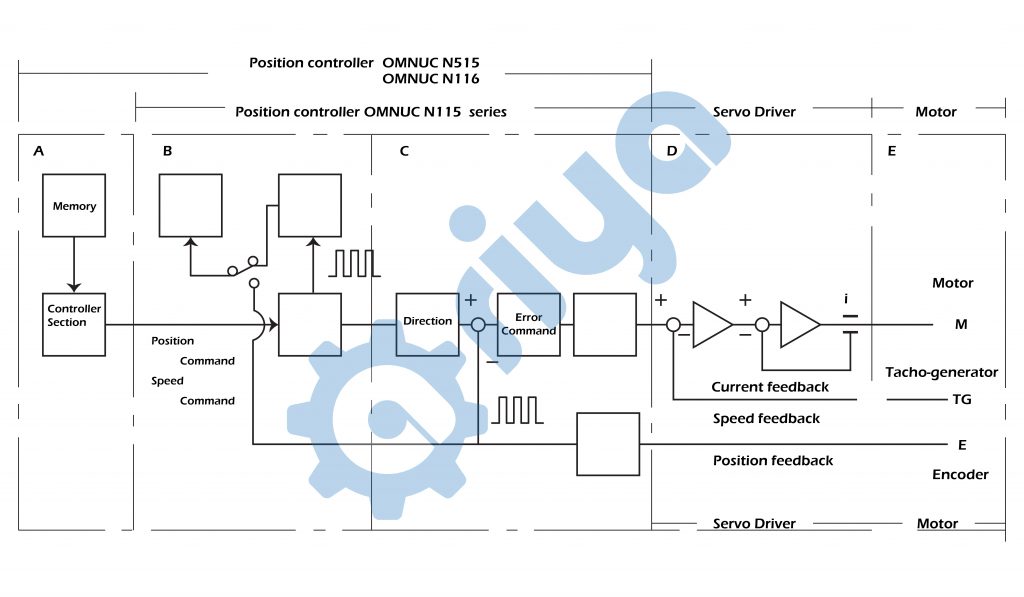
شکل 16:نمایش بلوک دیاگرام سیستم داخلی سروو درایور
همانطور که در شکل 16 نشان داده شده است سیگنال فرمان تعداد پالسهای یک اسیلاتور را مشخص میکند و زمانیکه مجموع پالسهای فرمان و سرعت (سیگنال فیدبک از انکدر که تبدیل به پالس میشود) برابر شود سروو درایور یک شکل موج مربعی مطابق با شکل 17 به موتور میفرستد. دستورات سرعت به موتور با وقفه اجرا میشود زیرا موتور باید بر گشتاور غلبه کند.
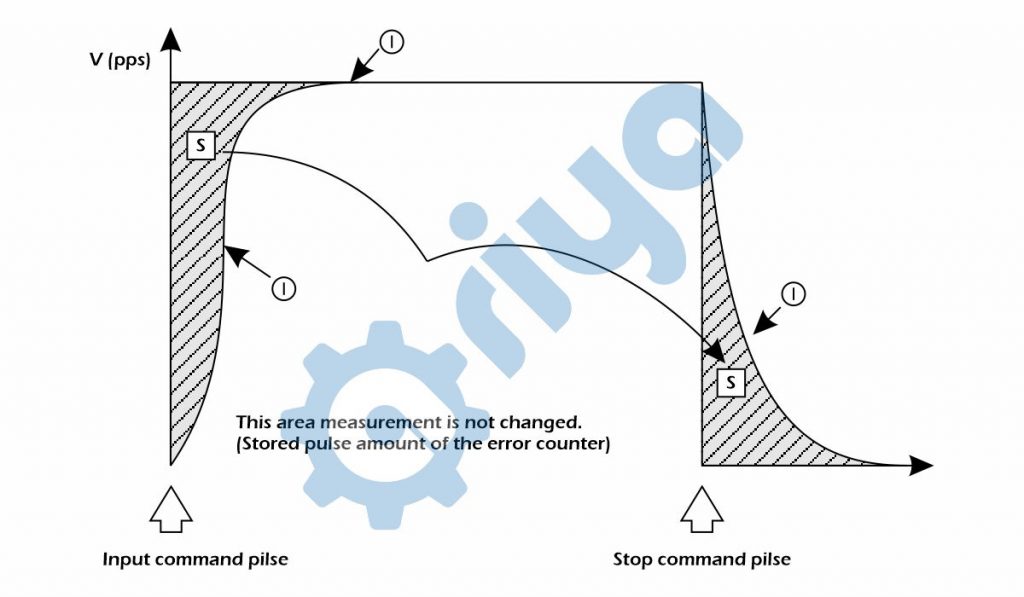
شکل 17:پالس ارسالی به موتور در صورت برابری سرعت واقعی با سیگنال فرمان
زمانیکه موتور سیگنال شکل 17 را دریافت کند فرکانس پالسهای خروجی با فرکانس تولیدی توسط پالس فرمان برابر شده و موتور در سرعت فعلی باقی می ماند. زمانیکه پالسهای برگشتی مکان معادل پالسهای فرمان میشود درایور تولید پالس را پایان میدهد. البته تاخیر زمان استارت و پایان که در شکل 17 با S نشان داده شده است در شمارنده خطا و مبدل آنالوگ به دیجیتال به صورت یکسری پالس ذخیره میشود و تا زمان تخلیه این پالسها موتور در سرعت مورد نظر باقی میماند.
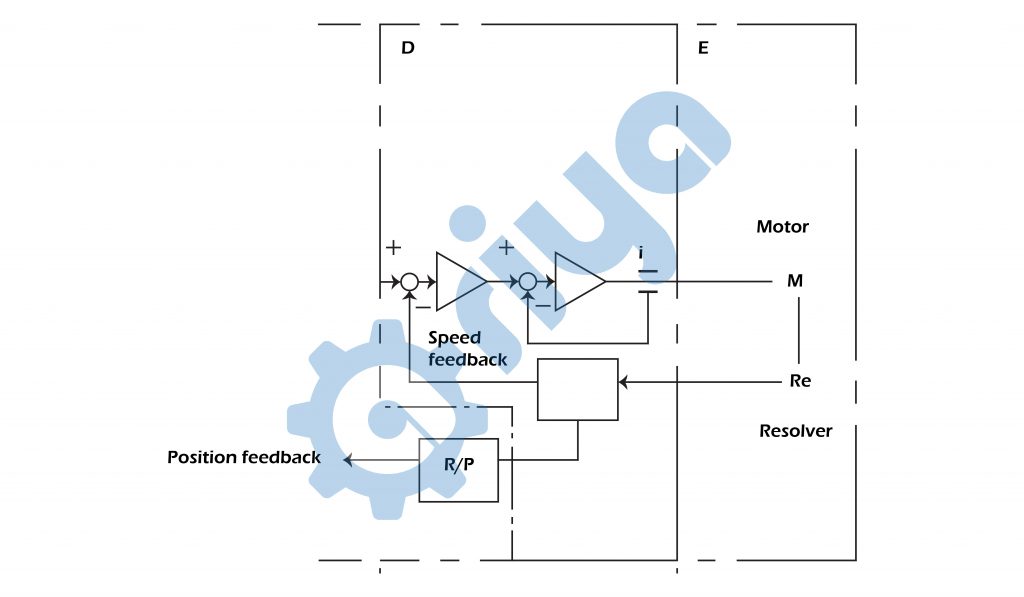
شکل 18:نمایش فیدبکهای سرعت و مکان
شمارنده خطا شمارنده انحراف ( اختلاف مقدار واقعی با set point ) نیز نامیده میشود.
پالسهای فرمان تا زمانیکه توسط مبدل دیجیتال به آنالوگ تبدیل به ولتاژ آنالوگ شوند، در درایور ذخیره میشوند این پالسها، پالسهای خطا یا انحراف نامیده میشوند. در شکل 18 فیدبکهای سنسور و مکان (که برای تولید پالس خطا به درایور برگشت داده میشود) نشان داده شده است. در شکل 19 نیز مبدل لازم برای فیدبک سرعت که فرکانس را به ولتاژ تبدیل میکند نشان داده شده است.
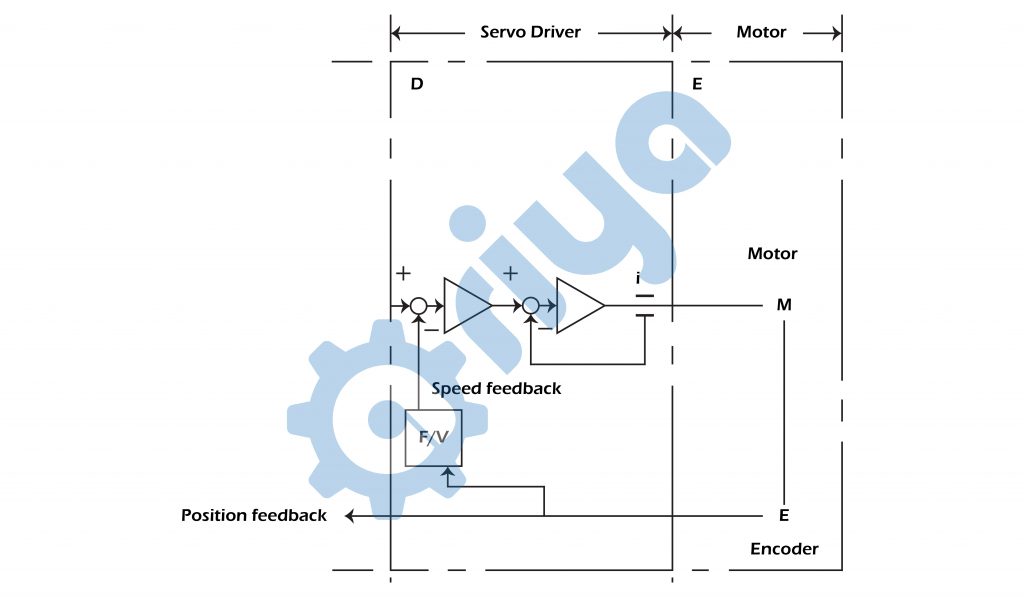
شکل 19:نمایش فیدبک و نوع تبدیلات برای تولید سیگنال خطا
اختلاف مقادیر فرمان و فیدبک بعد از رسیدن مکان به نقطه مطلوب از نظر تئوری باید صفر باشد حال آنکه این مقدار با ارسال پالس توسط انکدر ممکن است عددی به غیر از صفر شود که بستگی به گشتاور سیستم نیز دارد.
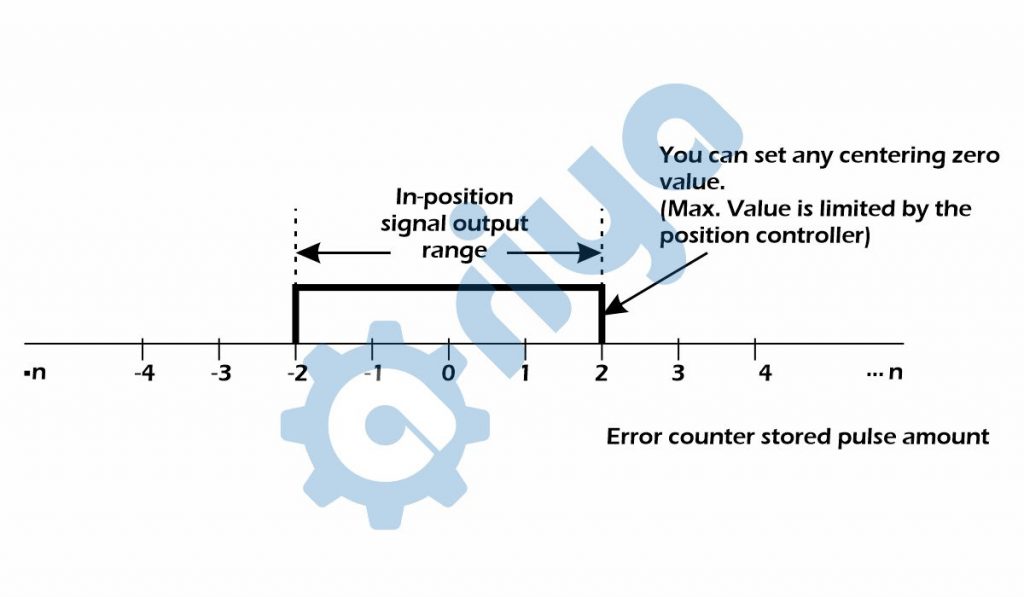
شکل 20:اختلاف از مقدار صفر (اختلاف سیگنال فرمان و مکان واقعی)
زمانیکه سیستم سروو مکان قطعه مکانیکی را به جایگاه مورد نظر رسانید و سیگنال اتمام تنظیم را دریافت نمود مرحله بعدی که In-Position نامیده میشود آغاز میشود و تابعی امکان تنظیم قطعه را فراهم میکند تا مقداری برای تغییرات احتمالی در نظر بگیرد مثالی از در نظر گرفتن مقدار این بازه در شکل 20 نشان داده شده است با تنظیم بازه این تغییرات و مشخص کردن آن برای تابع، سیستم میتواند به مرحله بعدی که افزایش سرعت سیستم برای رسیدن به نقطه مطلوب است وارد شود و با استفاده از این تابع پیشرفته سیستم کنترل قادر خواهد بود در مدت کوتاهتری اختلاف را به صفر برساند.
3-سروو موتور
ساختمان اساسی و کارکرد موتورهای سروو مشابه موتورهای القایی معمولی میباشد با این تفاوت که این موتورها برای دقت بالاتری طراحی شدهاند و با استفاده از برخی تسهیلات مکانیکی سرعت و فرکانس بالاتری برای تنظیم سرعت و مکان دارند.
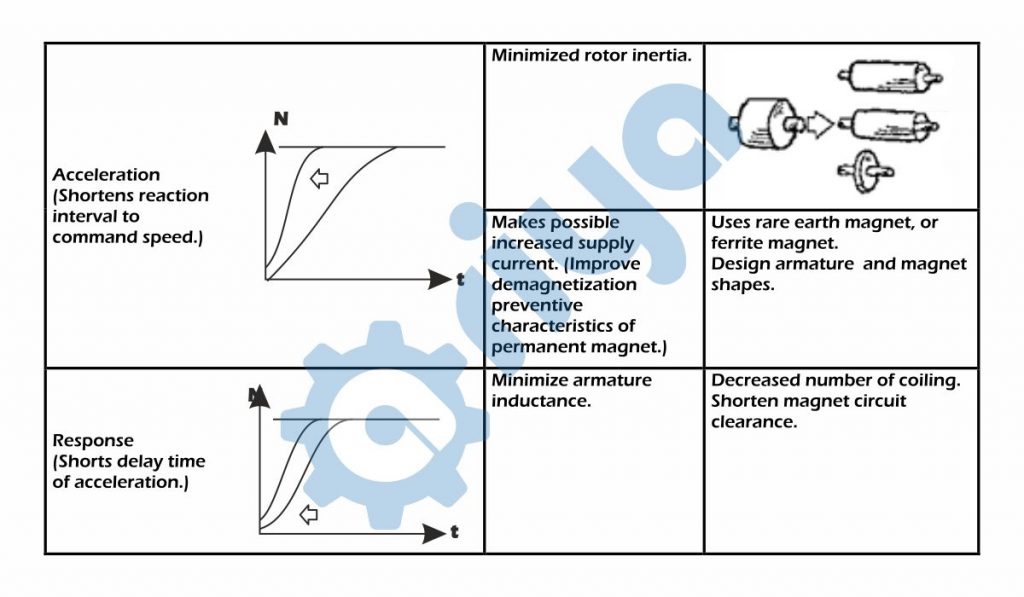
شکل 21:مزایای موتورهای سروو نسبت به موتورهای AC معمولی
در شکل 21 مزایای سروو موتور نسبت به موتور القایی معمولی آورده شده است. در این موتورها اینرسی روتور حداقل شده است و جریان تحریک را میتوان افزایش داد و میدان مغناطیسی بیشتری با یک جریان معین در استاتور ایجاد نمود و شتاب در این موتورها بیشتر است.در شکل 22 سایر مزایای موتورهای سروو از قبیل بازه کنترلی بالاتر، قدرت تحمل ولتاژ بالاتر، افزایش اشباع مغناطیسی، افزایش مقاومت عایقی، کاهش نوسانات گشتاور و سرعت، توانایی در افزایش ناگهانی شتاب و فرکانس و افزایش طول عمر قطعات نشان داده شده است.
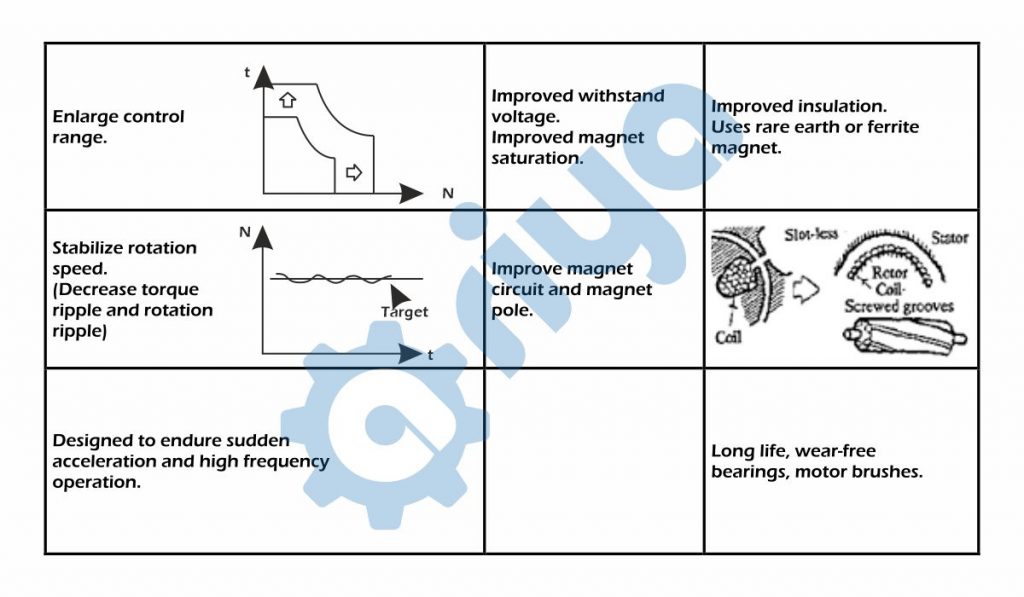
شکل 22:مزایای موتور سروو
در شکل 23 تقسیمبندی موتورهای سروو نشان داده شده است. این موتورها به 3 دسته AC و DC و موتور پلهای تقسیم میشوند. سروو موتورهای AC خود به دو دسته سرووهای سنکرون و موتورهای القایی تقسیم میشوند.
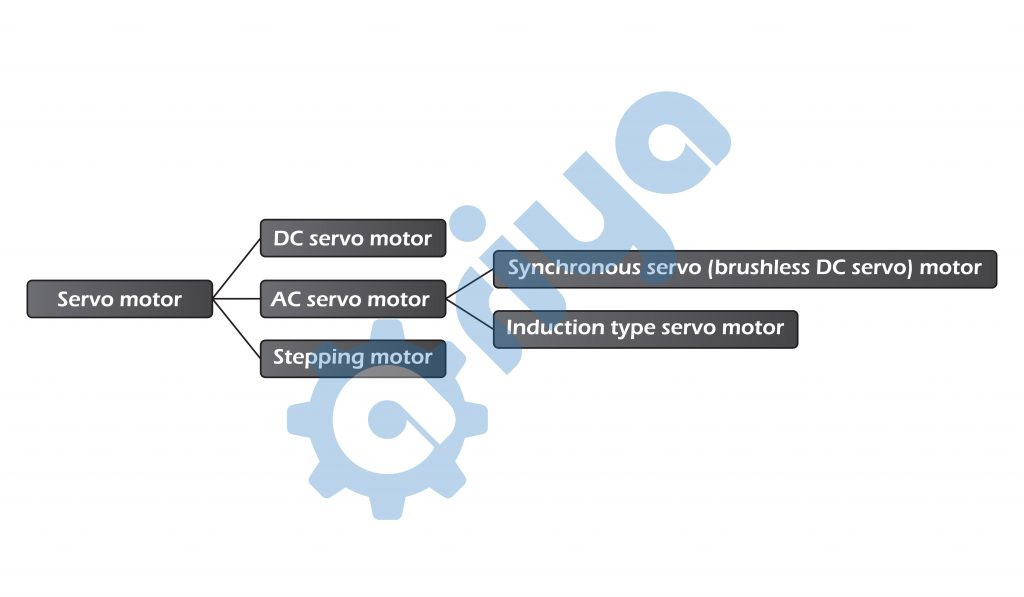
شکل 23:تقسیمبندی موتورهای سروو
در شکل 24 معایب و مزایای هر یک از انواع سروو موتور آورده شده است. همانطور که دیده میشود موتورهای سروو القایی بیشترین توان خروجی، سرعت و گشتاور بالا، قیمت بالا و مدارهای کنترلی پیچیدهای دارند.
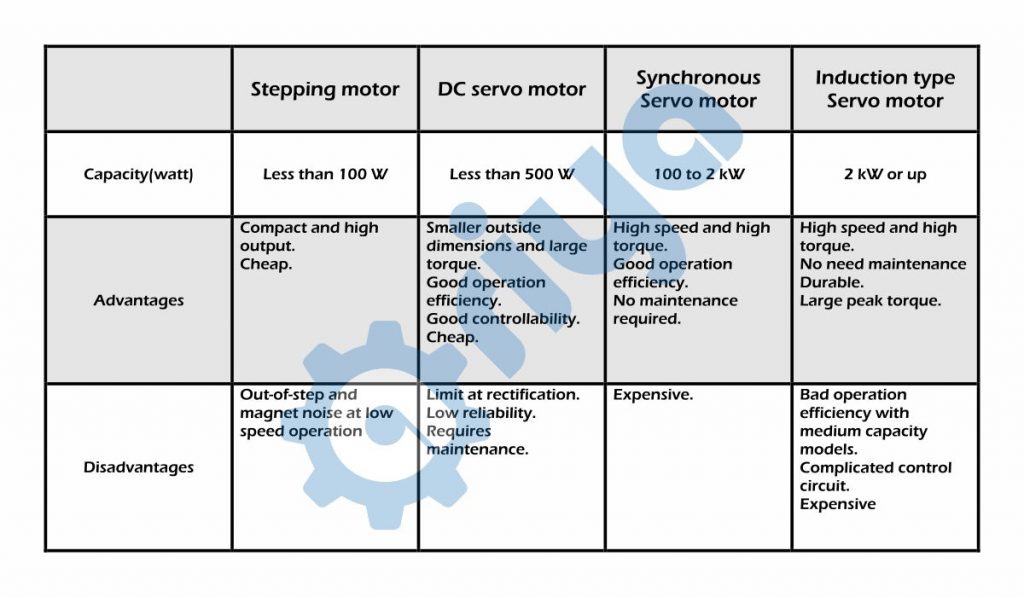
شکل 24: مزایا و معایب هر یک از انواع سروو موتور
از دیگر مزایای موتورهای سروو AC وجود آهنربای دائمی در رتورو وجود میدان مغناطیسی گردشی در استاتور میباشد. در شکل 25 یک سروو موتور القایی نشان داده شده است.
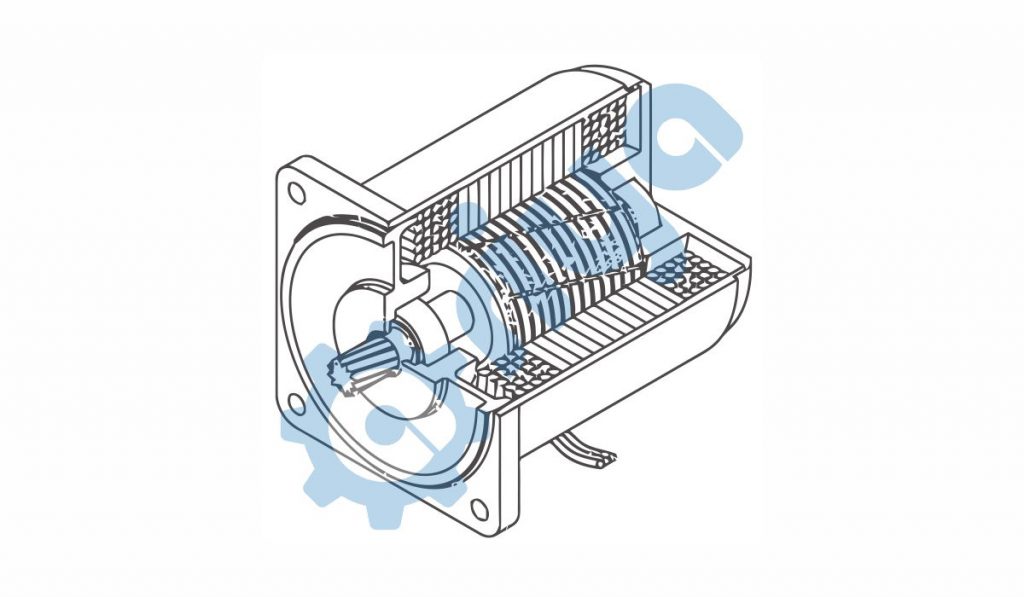
شکل 25:سروو موتور القایی
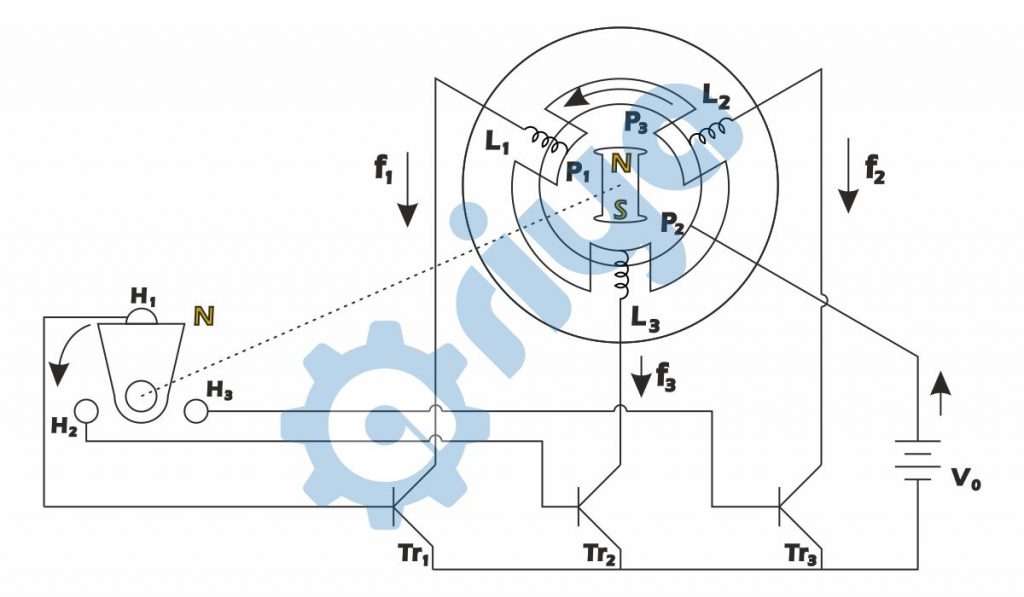
شکل 26:چگونگی جریان رسانی در یک سروو موتور 3 فاز القایی
در شکل 26 چگونگی پخش جریان در یک موتور القایی 3 فاز نشان داده شده است با روشن شدن هر ترانزیستور یک سیمپیچ برقدار میشود و با برقدار شدن هر سیمپیچ موتور 120 درجه میچرخد.
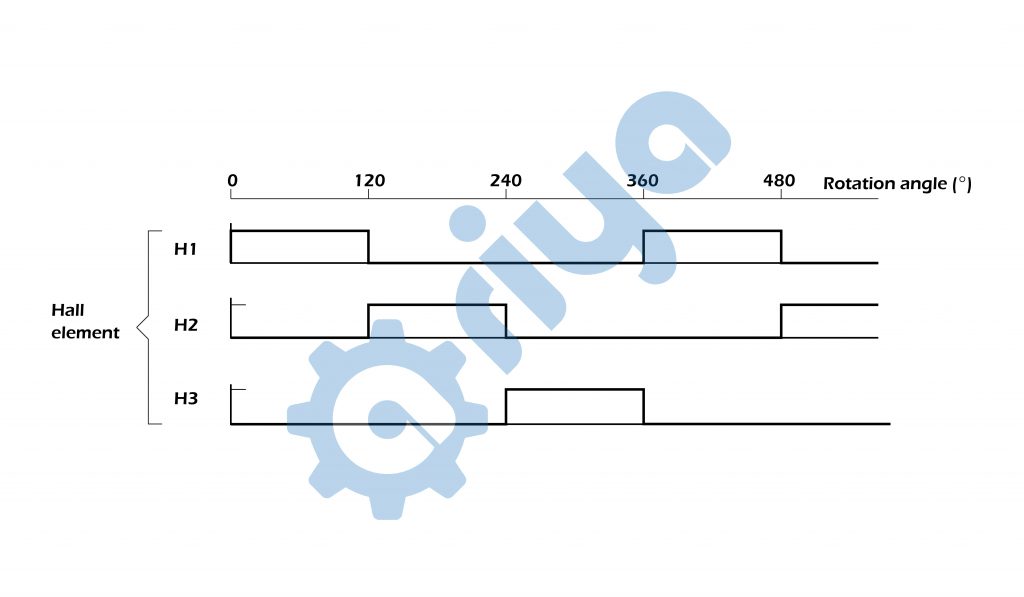
شکل 27:سیکل برقدار شدن و مغناطیسی شدن سه سیمپیچ
شکل 27 سیکل برقدار شدن و مغناطیسی شدن هر سیمپیچ را نشان میدهد. همانطور که دیده میشود هر سیمپیچ در یک سیکل 360 درجهای به اندازه 120 درجه برقدار است.در شکل 28 جهت چرخش موتور القایی AC در صورت برقدار شدن هر یک از سیم پیچها نشان داده شده است.
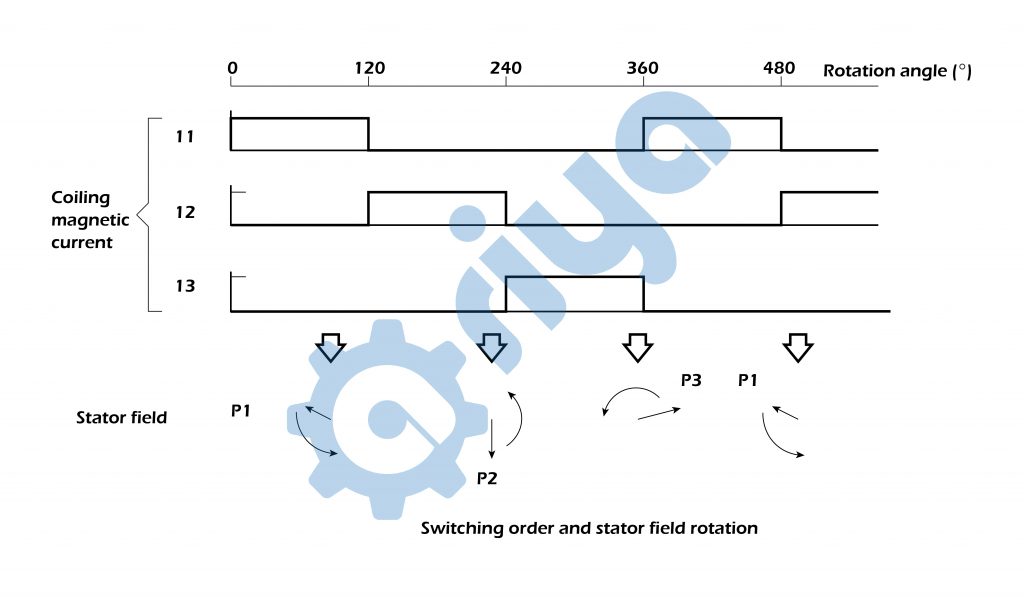
شکل 28 : نمایش جهت چرخش موتور در هنگام برقدار شدن هر یک از سیمپیچها

شکل 29:خصوصیات سروو موتور AC
شکل 29 خصوصیات موتور AC را نشان میدهد. همانطور که نشان داده شده است سرعت موتور با ولتاژ ورودی به موتور متناسب است و گشتاور موتور نیز متناسب با جریان میباشد در نتیجه از آنجا که توان ورودی برابر ضرب ولتاژ و جریان ورودی است توان خروجی نیز معادل ضرب سرعت در گشتاور خروجی میباشد.
در موتورهای القایی زمان افزایش و کاهش شتاب t با اینرسی لحظهای j و سرعت متناسب است و با گشتاور نسبت عکس دارد و افزایش گشتاور تولیدی موتور سبب کاهش این زمان میشود.
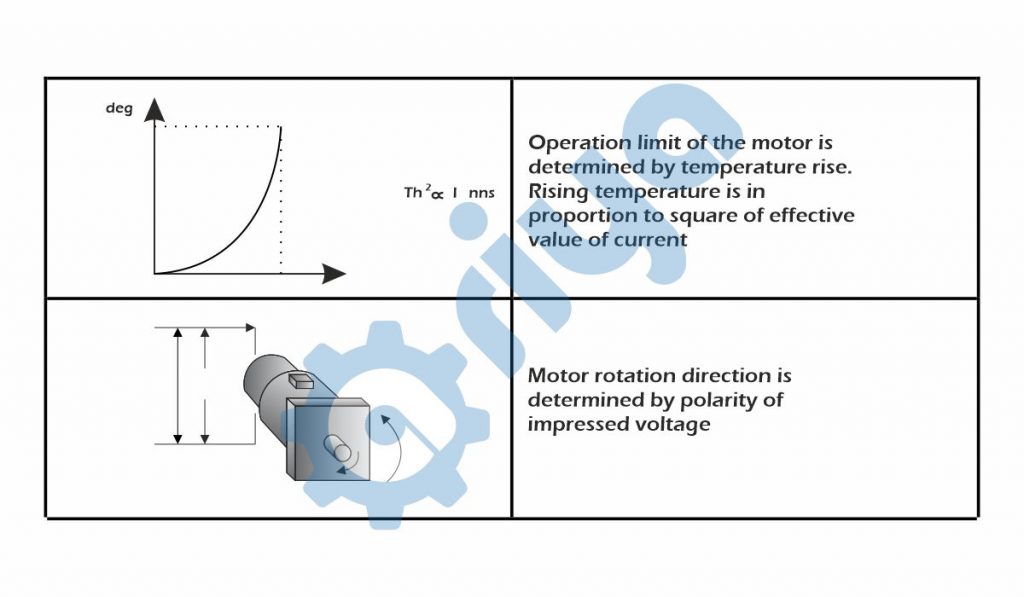
شکل 30:تاثیر جریان و ولتاژ موتور القایی در افزایش دما و جهت حرکت
شکل 30 نیز نشان میدهد افزایش دما در موتور سروو با جریان به توان 2 نسبت مستقیم دارد و جهت چرخش موتور سروو را نیز میتوان با تغییر جهت ولتاژ موثر تغییر داد.
5- Detectir(سیستم شناسایی مکان)
سیستمهای Detector با توجه به طریقه شناسایی (مکان یا سرعت) طبقهبندی میشوند. Detector به سروو موتور متصل میشود و در چندین رده طبقهبندی میشوند که اساس این طبقهبندی سیستم شناسایی Detector است. Detectorها در انکدر و Resolver استفاده میشوند و قابلیت شناسایی سرعت و مکان را دارند.
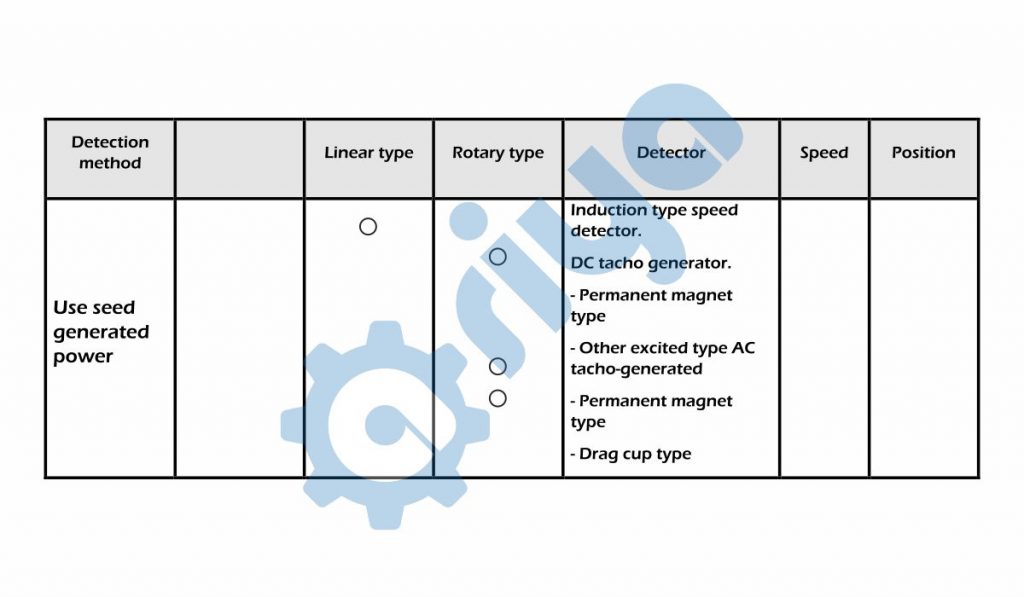
شکل 31:Detectorهایی که سیستم داخلی آنها با تولید توان (مانند دینام) مکان یا سرعت را شناسایی میکند
در شکل 31 Detectorهایی که اساس تشخیص آنها تولید قدرت و توان خروجی است آورده شدهاند. در شکل 32 نیز Detectorهایی که اساس تشخیص آنها تولید پالس یا فاز است آورده شدهاند.
امروزه بیشتر از انکدرها و Resolverهای به صورت گردشی استفاده میشود. برای مثال در شکل 33 یک انکدر افزایشی چرخشی نشان داده شده است. یک اشعه نوری که به دیسک ثابت متصل است به صفحه چرخان تابیده میشود و یک صفحه چرخان به شفت وصل میشود.
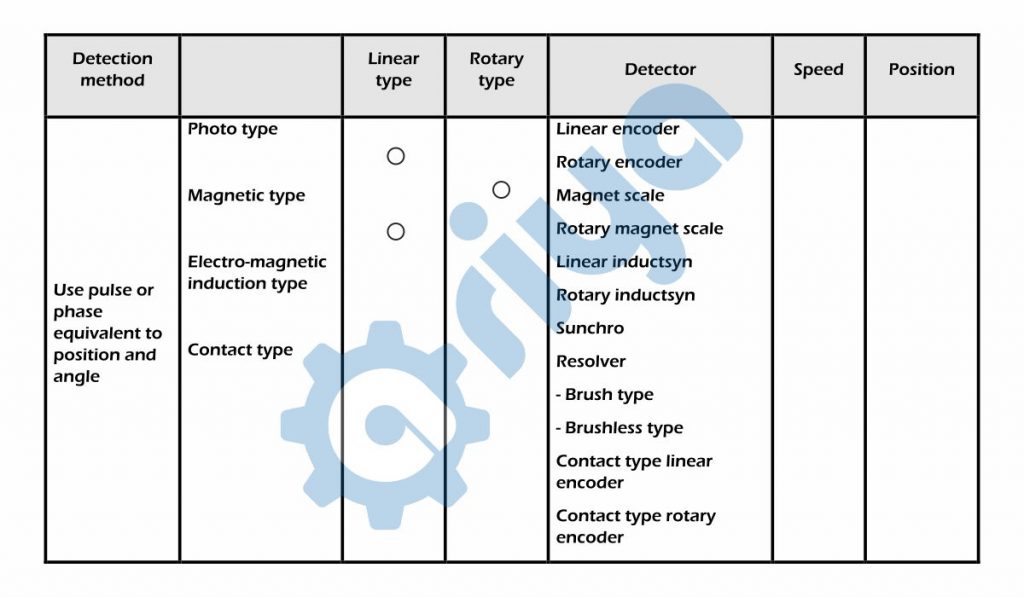
شکل 32: Detectorهایی که سیستم داخلی آنها تولید پالس یا فاز معادل مکان یا زاویه میباشد
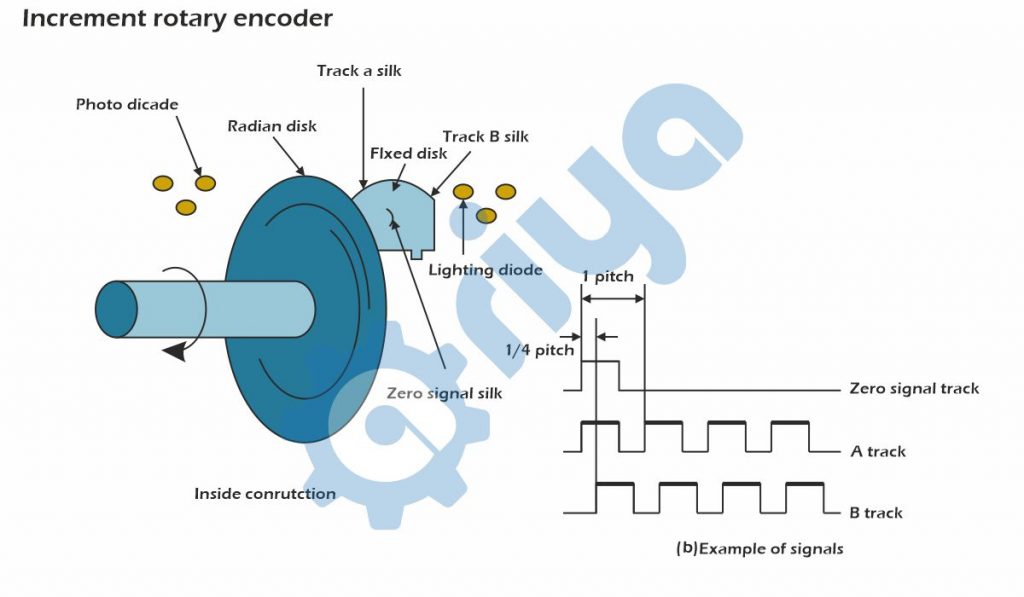
شکل 33:نمایش انکدرهای چرخشی با حرکت دورانی
زمانیکه شیارهای دو صفحه چرخان و متحرک از کنار یکدیگر (در حین چرخش) عبور میکند اشعه قطع و وصل میشود و این قطع و وصل شدن توسط یک دیود نوری تبدیل به سیگنال الکتریکی میشود. شیارهای A و B که در صفحه ثابت وجود دارد باعث اختلاف فاز 90 درجه در دو سیگنال الکتریکی خروجی میشود (شکل 33). شمارش پالسهای الکتریکی امکان شناسایی زاویه چرخش را فراهم میکند. مقایسه خروجی شیارهای A و B در یک مدار الکتریکی نیز امکان شناسایی جهت چرخش را ممکن میسازد. این نوع انکدرها ساختمان سادهای دارند و ارزان میباشند و زمانیکه تغذیه قطع شود امکان شمارش پالس وجود ندارد.
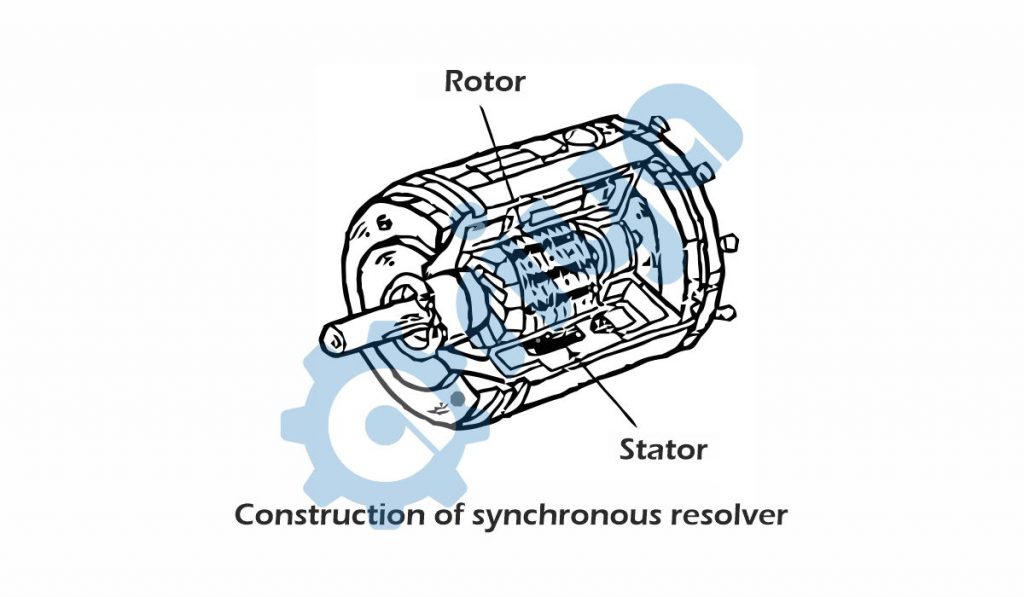
شکل 34:ساختار Resolver سنکرون با چرخش رتور
شکل 34 ساختار یک موتور سروو القایی با امکان نصب Resolver را نشان میدهد. Resolver آشکارساز زاویه چرخش هستند و برای شناسایی زاویه چرخش مکانیکی بسته به ولتاژ الکترومغناطیسی القایی رتور کار میکنند. دو سیمپیچ استاتور با 90 درجه اختلاف نسبت به یکدیگر به دور سیمپیچ رتور نصب میشوند. زمانیکه یک ولتاژ AC با فرکانس مشخص به سیمپیچ رتور وصل میشود رتور یک ولتاژ القایی بسته به زاویه دوران القا میکند.
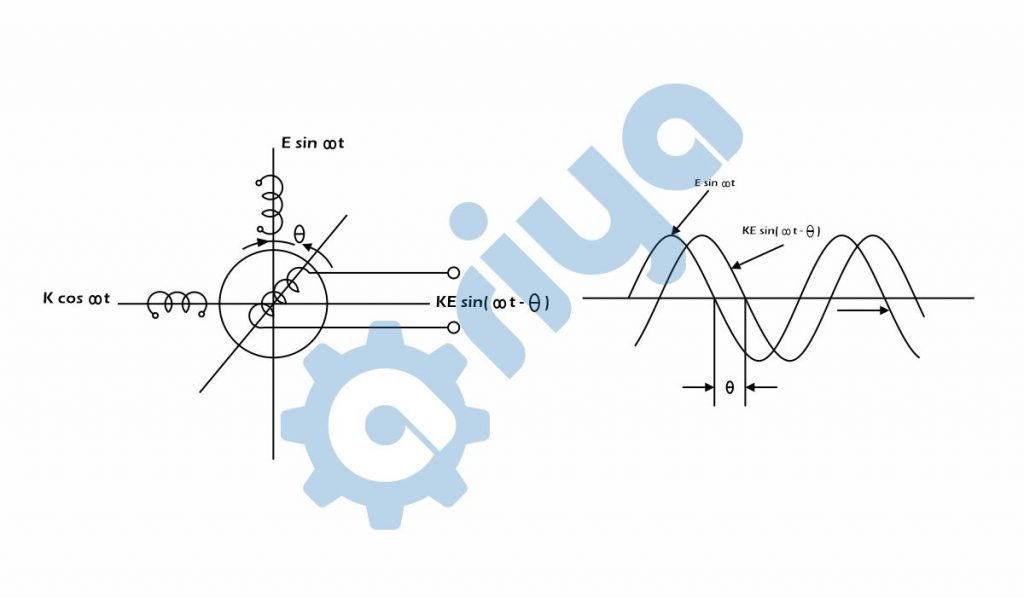
شکل 35:چگونگی تشخیص مکان توسط Resolver
مطالب ذکر شده در شکل 35 مشخص است و همانطور که مشاهده میشود با چرخش مکانیکی به اندازه θ ولتاژ سینوسی نیز به اندازه θ شیفت پیدا کرده است. از برتریهای این سیستم نسبت به انکدرهای چرخشی میتوان به موارد زیر اشاره کرد.
1- نسبت به لرزش، شک و نویزهای الکتریکی غیر حساسند و در آنها از قطعات نیمههادی الکترونیکی استفاده نشده است.
2- نسبت به تغییرات منبع تغذیه پایدارند و از به دلیل اینکه در ساختار آنها از نیمههادی استفاده نشده است نسبت به تغییرات دما پایدارترند.
3- بسادگی قابلیت تبدیل آنالوگ به دیجیتال را دارند.
جدول 5‑1:مزایای هر یک Detectorها

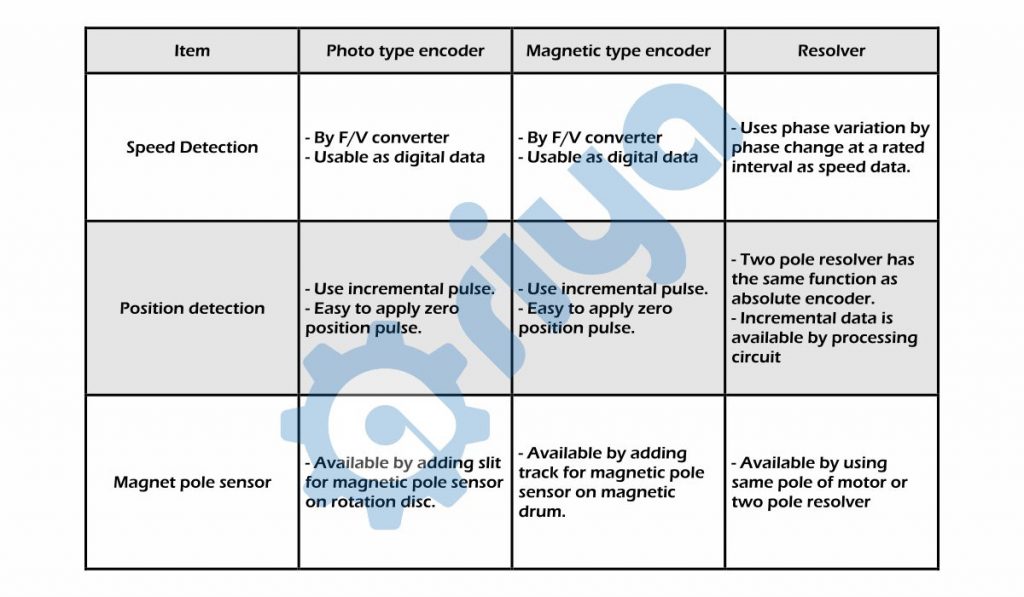
در جدول 5‑1 مزایای 3 آشکارساز آورده شده است. از آنجا که انکدرهای نوری نسبت به لرزش ضعیف هستند در جدول 5‑2 نیز روشهای آشکارسازی سرعت و مکان و چگونگی افزودن سنسور مغناطیسی آورده شده است.
جدول 5‑2:خصوصیات هر یک از آشکارسازها
6- سروو درایور و سیستمهای کنترل موقعیت
قسمت اصلی الکترونیکی یک درایور ترانزیستورهای PWM آن میباشد شکل 36 مثالی از مدارهای اصلی ترانزیستوری میباشد .
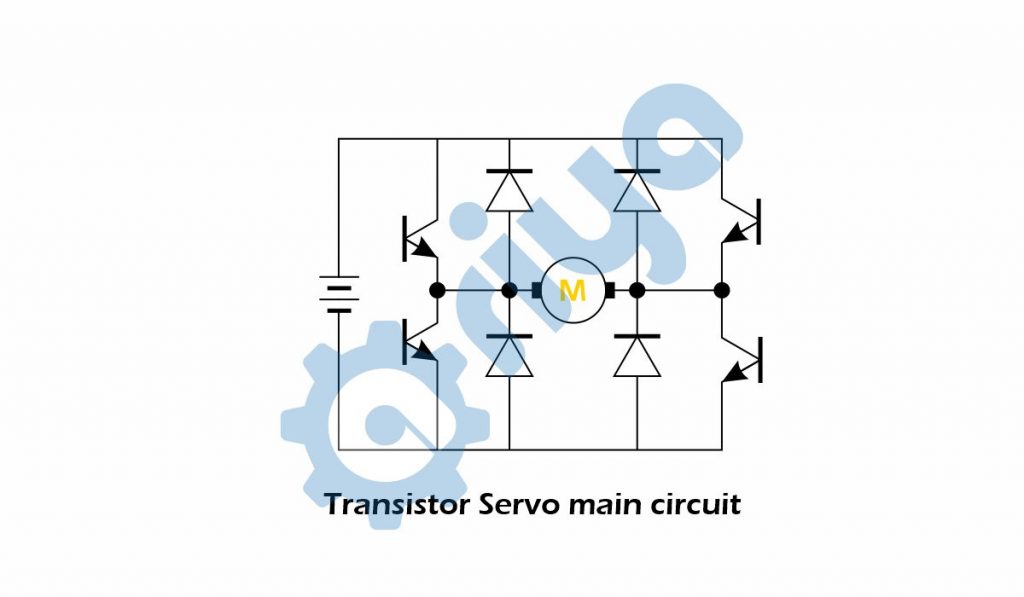
شکل 36:مثالی ساده از سیستم PWM داخلی درایور
شکل 37 بلوک دیاگرام مدار کنترلی تا بیس ترانزیستورها را نشان میدهد.
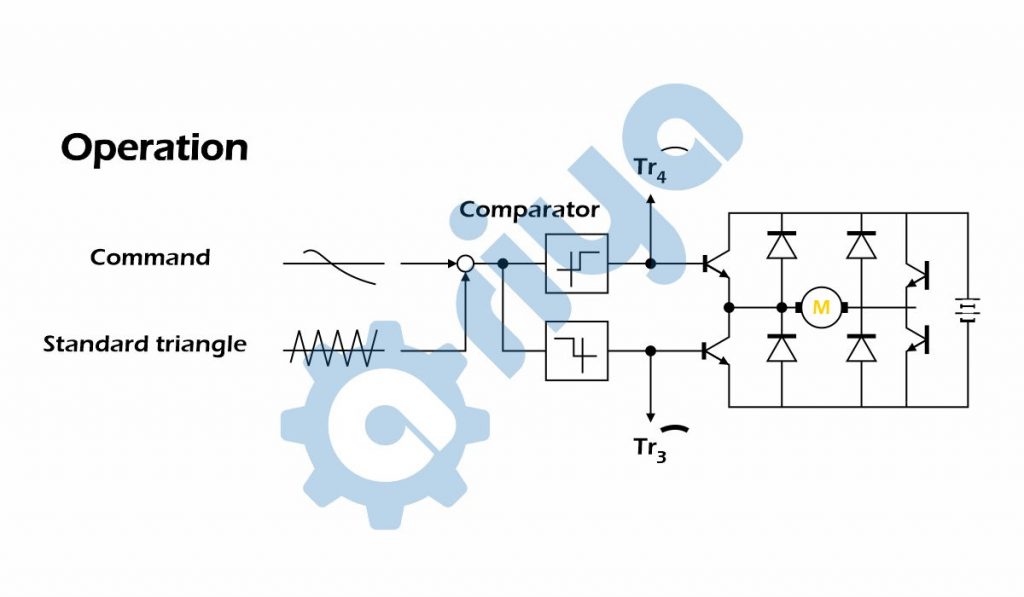
شکل 37:نمایش بلوک دیاگرامی سیستم کنترلی
برای تعیین موقعیت میتوان از دو سیستم استفاده نمود. PTP و CP که هر کدام کاربرد خاص خود را دارد . سیستمهای PTP برای سیستمهای هدف طراحی شدهاند و مسیر طی شده در این سیستمها چندان مهم نیست و مسیر حرکت تا رسیدن به نقطه مورد نظر ممکن است بسته به مکانیزم حرکت درایور و سرعت درایور تغییر کند.
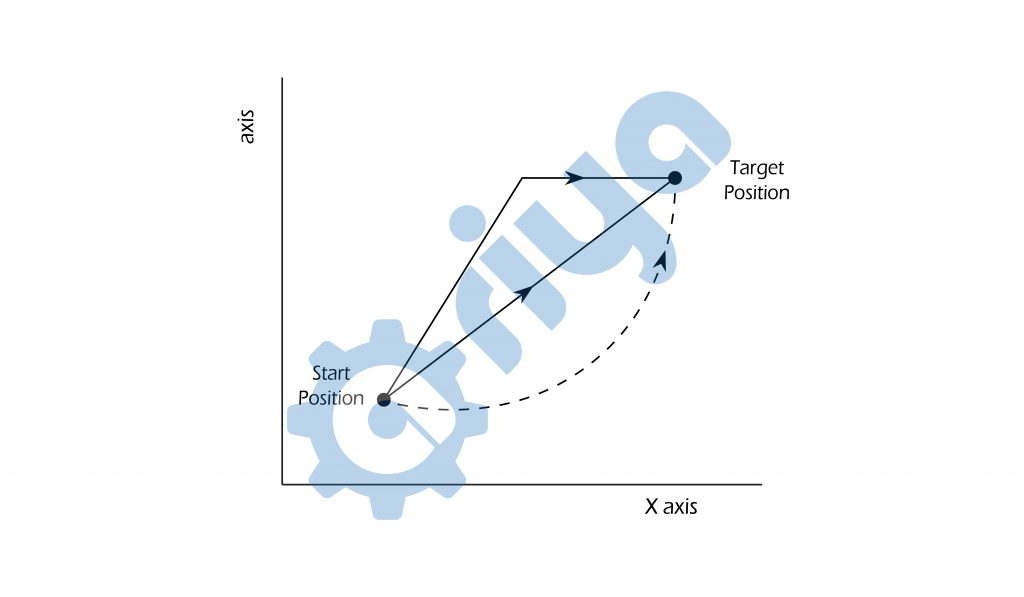
شکل 38:سیستم تعیین موقعیت نقطه به نقطه
در شکل 38 نشان داده شده است که چگونه با بردارها و مسیرهای مختلف نقطه ابتدا و انتها به یکدیگر متصل شدهاند. اما در روش کنترلی CP برای رسیدن به نقطه هدف مسیر خاصی مشخص میشود در شکل 39 این روش به دو صورت خطی و منحنی نشان داده شده است.
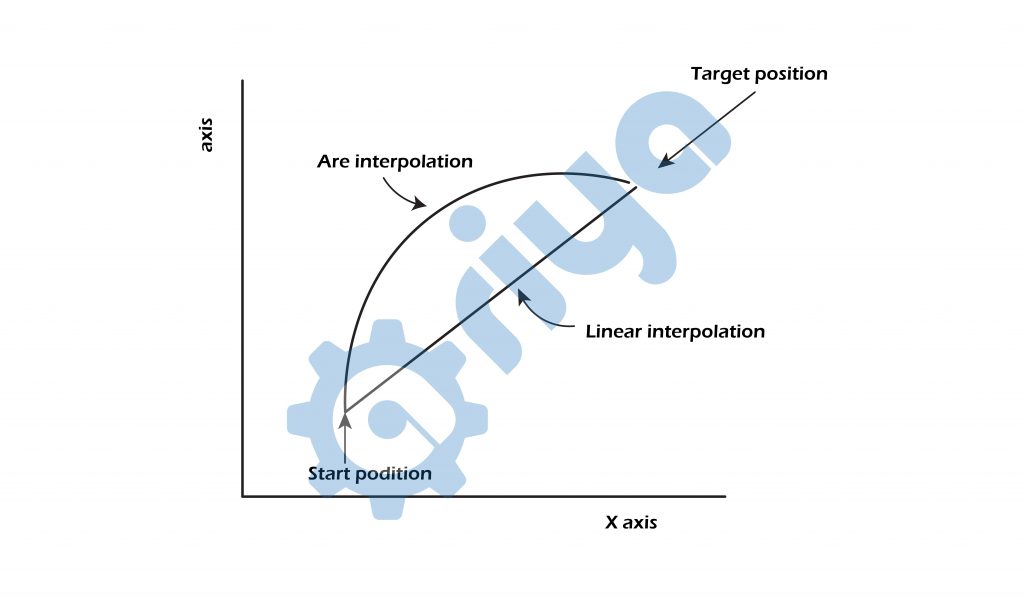
شکل 39:روش تعیین موقعیت CP
علاوه بر روش کنترل بر اساس موقعیت دو روش کنترلی سرعت و گشتاور نیز در سیستمهای سروو درایور وجود دارد برای کنترل سرعت درایور ولتاژ موتور را تغییر میدهد و برای کنترل گشتاور درایور جریان موتور را تغییر میدهد.
در روش سرعت با استفاده از سروو میتوان موتور را به دور نامی رسانید و یا سرعت موتور را هماهنگ با بار مورد نیاز نمود. در شکل 40 مثالی از هماهنگ کردن سرعت موتور توسط سروو با بار مورد نیاز نشان داده شده است.
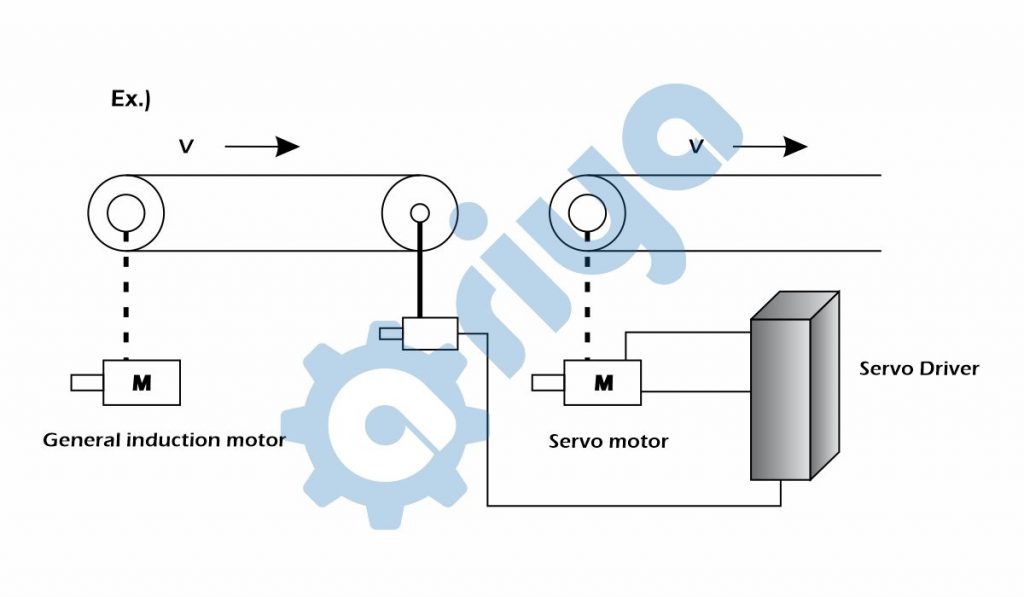
شکل 40:کنترل موتور سروو توسط درایور سروو به روش سرعت
گشتاور موتور نیز با تغییرات جریان متناسب است. برای محدود کردن گشتاور یک موتور کافیست درایور جریان موتور را تنظیم کند. همانطور که در شکل 41 نشانداده شده است یک سنسور جریان برای محدود کردن جریان درایور به منظور کنترل گشتاور در نظر گرفته شده است.
شکل 41:روشهای کنترل سروو موتور توسط سروو درایور
یکی از مهمترین شرایط لازم برای کنترل موقعیت، پاسخ فرکانسی درایور است هر چه سرعت و رزولوشن بالاتری برای سیستم سروو لازم باشد پاسخ فرکانسی باید محدوده وسیعتری داشته باشد.
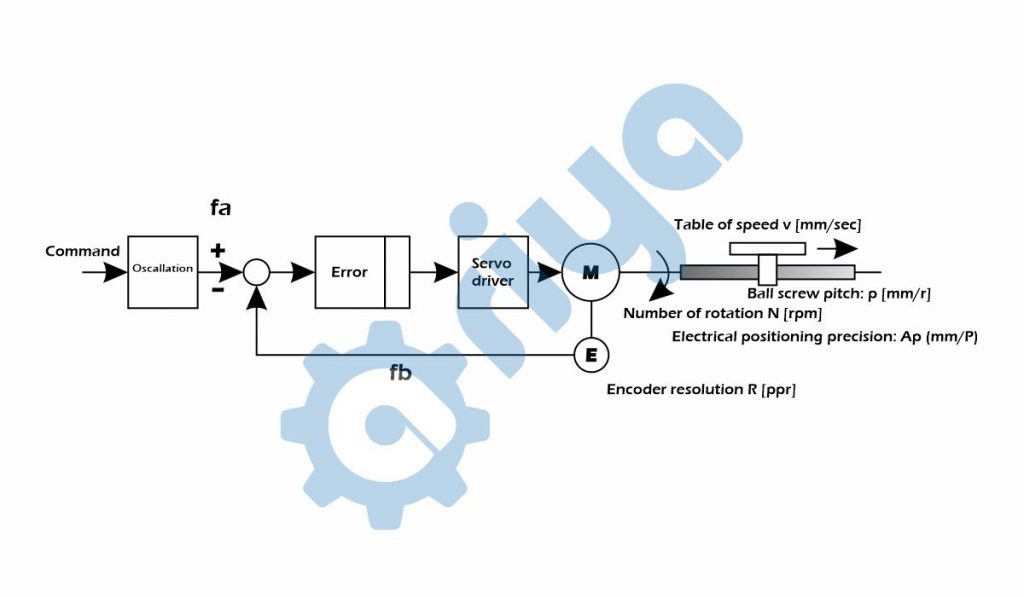
شکل 42:محاسبه دقت سیستم با استفاده از دقت الکترونیکی سیستم تعیین مکان و رزولوشن انکدر
یکی از مهمترین خصوصیات یک سیستم کنترلی سروو که با سیستم تشخصیت موقعیت کار میکند پاسخ فرکانسی میباشد. در حال حاضر با پیشرفت سیستمهای کنترلی سرعت و رزولوشن بالاتری برای سیستمهای سروو مورد نیاز است و برای دستیابی به رزولوشن بالاتر باید شرایط و پاسخ فرکانسی را در نظر گرفت.
همانطور که در شکل 42 نشان داده شده است برای بدست آوردن رزولوشن و فرکانس کار مدار و اسیلاتور فیدبک و فرمان باید با دانستن رزولوشن مکانی، حداکثر سرعت موتور و گام Ball Screw دور موتور را بدست آورد مراحل در زیر توضیح داده شده است.
1- برای بدست آوردن موقعیت مکانی از نظر مکانیکی نیاز به دانستن مشخصات زیر است:
Ap رزولوشن مکانی میباشد که برای مثال 0.01 در فرمول 6‑1 نظر گرفته شده است.
Vmax حداکثر سرعت تعیین موقعیت میباشد که برای مثال در فرمول 6‑2، 500 در نظر گرفته شده است.


P گام Ball Screw میباشد که برای مثال در فرمول 6‑3، 10 در نظر گرفته شده است.
2- برای محاسبه دور موتور از فرمول 6‑4 استفاده میکنیم

حال با دانستن رزولوشن انکدر میتوان فرکانس فیدبک و فرمان برای سروو درایور را بدست آورد.
رزولوشن انکدر را با استفاده از فرمول 6‑5 بدست میآوریم

7- چگونگی محاسبات انتخاب سیستم موتور و Ball Screw
گام اول: اولین مرحله برای انتخاب موتور و درایو مناسب شناسایی سیستم و بدست آوردن پارامترهای آن است وزن باری که توسط Ball Screw جابجا میشود.(m)
1- ضریب اصطکاک لبههای Ball Screw (μ)
2- بازده Ball Screw (η)
3- ضریب اصطکاک داخلی فشار پیلوت مهره (.μ)
4- قطر شفت Ball Screw (DB )
5- طول کلی Ball Screw (LB)
6- ماده استفاده شده در Ball Screw و چگالی آن (ρ)
7- طول گام Ball Screw
8- رزولوشن Ball Screw (منظور تغییر طول به ازای هر پالس ΔL)
9- کل تغییرات Ball Screw (L)
10- سیکل هر جابجایی (کسری از ثانیه S)
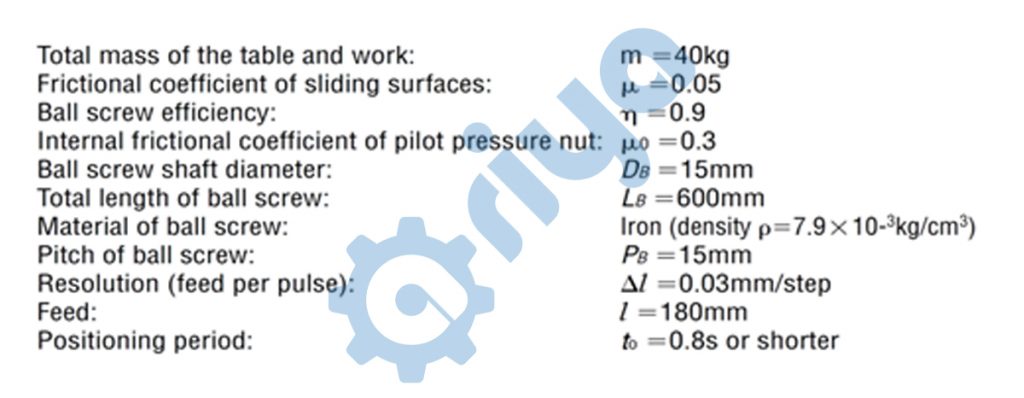
شکل 43:پارامترهای مورد نیاز برای انجام محاسبات در سیستمهای سروو با مکانیزم Ball Screw
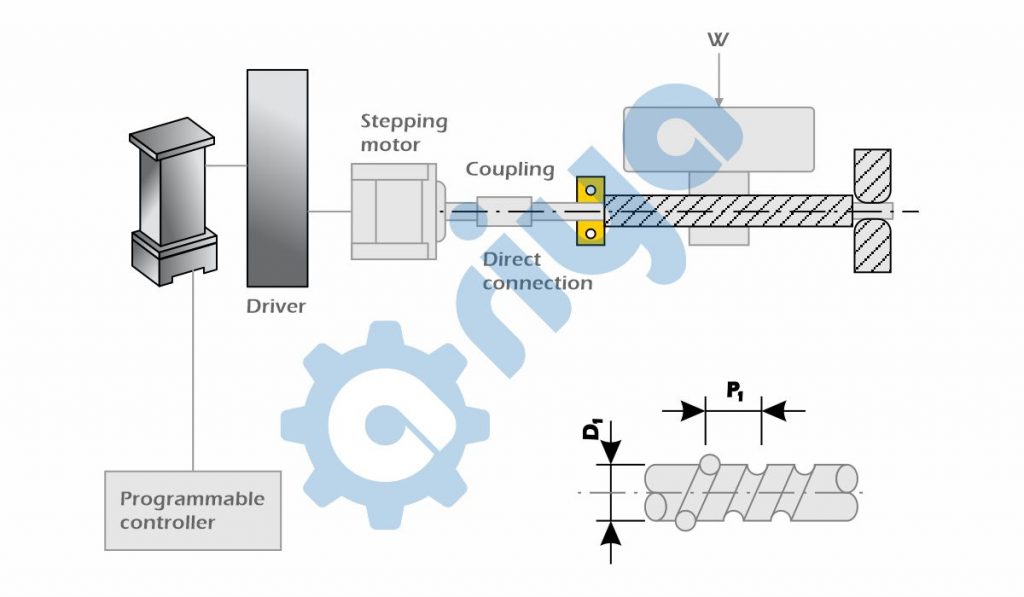
شکل 44:نمایش اتصال به سیستم کنترل و قطر و گام Ball Screw
در شکل 43 پارامترهای مورد نیاز آورده شده و مقادیری برای مثال به آنها اختصاص داده شده است.
گام دوم: محاسبه رزولوشن حرکت موتور میباشد که به ازای هر پالس درایو شفت موتور چند درجه حرکت داشته باشد (sӨ). رزولوشن موتور را میتوان با استفاده از فرمول 7‑1 بدست آورد.

بنابراین در این مثال رزولوشن موتور باید 0.72 درجه باشد که این زاویه، میزان چرخش موتور به ازای هر پالس است. این رزولوشن را با استفاده از یک سروو موتور 5 فاز سری RK میتوان تامین کرد.
گام سوم: در این مرحله باید تعداد پالسهای لازم برای فرمان به موتور، زمان شتابگیری و فرکانس ارسال پالس را محاسبه نمود.

در فرمول 7‑2 طریقه بدست آوردن پالسهای مورد نیاز آورده شده است. در اولین ضرب کل طولی که باید طی شود تقسیم بر گام شده است و در دومین ضرب زاویه طی یک گام (360 درجه) تقسیم بر زاویه حرکتی به ازای هر پالس شده است.


اگر زمان شتابگیری مطابق شکل 45 25% کل زمان باشد این زمان طبق فرمول 7‑3 بدست میآید.
شکل 45:زمان شتابگیری و توقف
همانطور که در فرمول 7‑3 دیده میشود این زمان 0.2 ثانیه است که مطابق شکل 45 همین زمان نیز برای توقف مورد نیاز است. فرکانس ارسال پالس 10kHZ است که مطابق با فرمول 7‑4 محاسبه شده است.

گام چهارم:بدست آوردن گشتاور لازم TM
اگر F نیروی بار در جهت حرکت شفت باشد مولفه عمودی نخواهد داشت و چون وزن بار وارد برعملگر برابر 40 کیلوگرم میباشد این نیرو طبق فرمول 7‑5 برابر است با:

◦F فشار وارد شده به مهره معمولا یک سوم فشار وارد آمده به لبههای Ball Screw است این نیرو طبق رابطه برابر است با:

گشتاور وارد شده بر بار حاصل نیروهای F و F◦ میباشد که بازوی آن نیز به گام هر مهره بستگی دارد (PB)
گشتاور بار TL مطابق با فرمول زیر محاسبه میشود:

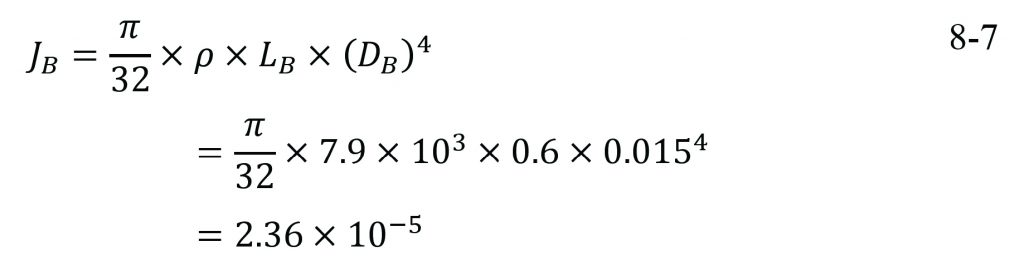
علاوه بر گشتاور بار گشتاور در لحظه شتابگیری نیز باید محاسبه شود (Ta) که به این منظور باید ممان اینرسی بار JL را بدست آورد. JL از حاصل جمع JB(ممان اینرسی Ball Screw) و JT(اینرسی بار وارد بر عملگر) بدست میآید. در رابطه 7‑8 ممان اینرسی Ball Screw که به طول، قطر و چگالی آن بستگی دارد محاسبه شده است.
در رابطه 7‑9 اینرسی بار که به گام و جرم بستگی دارد محاسبه شده است.

حال میتوان طبق رابطه 7‑10 ممان اینرسی کل را محاسبه نمود

حال میتوان گشتاور را در زمان شتابگیری با استفاده از رابطه 7‑11 بدست آورد.
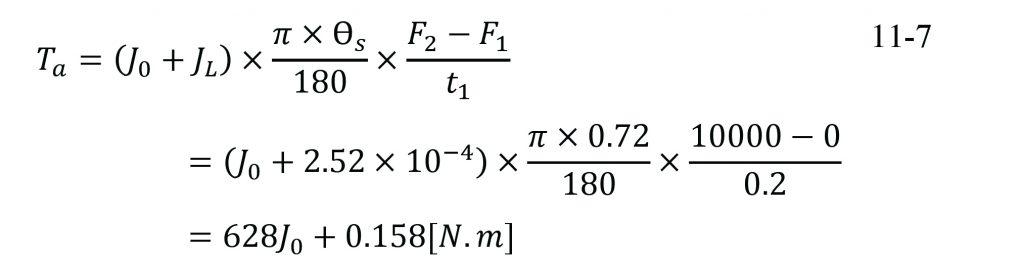
در این رابطه زاویه رزولوشن را به رادیان تبدیل کرده و بر دوره تناوب و زمان شتابگیری تقسیم میکنیم JL ممان اینرسی بار و J0 ممان اینرسی رتور میباشد. حال با دانستن TL و Ta گشتاور مورد نیاز TM را بدست میآوریم.

گام پنجم:انتخاب موتور
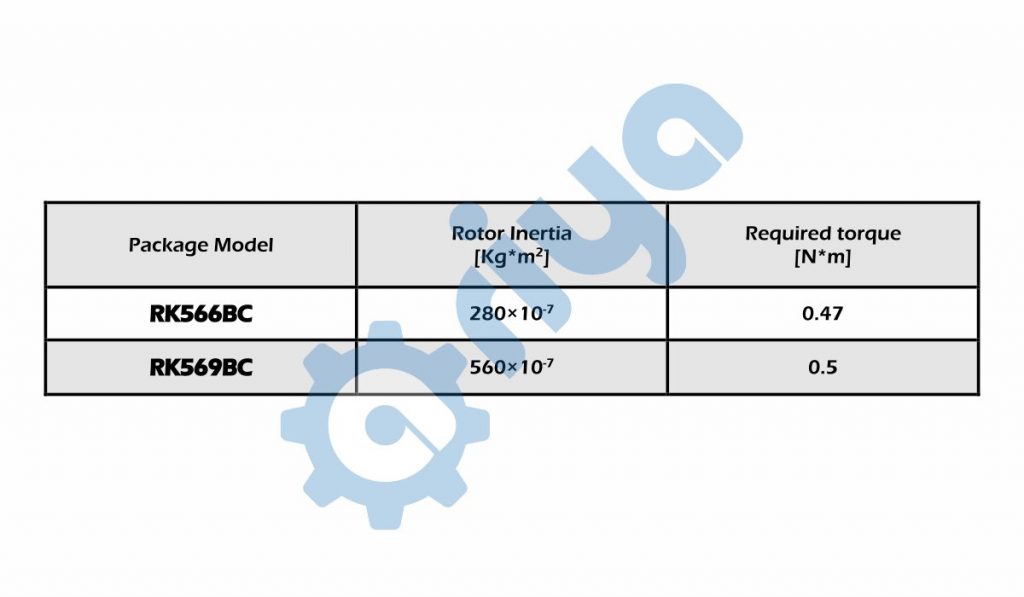
برای مثال دو موتور مطابق شکل بهصورت موقتی انتخاب کرده و سپس شرایط آنها را بررسی میکنیم.
شکل 47:نمودار گشتاور-سرعت موتور مدل RK566BC
که از گشتاور مورد نیاز بیشتر است.
مرحله ششم:بررسی نرخ شتابگیری موتور و نسبت لختی
هر دو پارامتر در موتور انتخابی باید بالاتر از مقادیر سیستم باشد در قدم اول نرخ شتابگیری (TR) را بدست میآوریم.

گام پنجم:انتخاب موتور
برای مثال دو موتور مطابق شکل بهصورت موقتی انتخاب کرده و سپس شرایط آنها را بررسی میکنیم.
شکل 46:دو موتور انتخابی شرکت Oriental motor
در اولین مرحله باید با بررسی نمودار سرعت-گشتاور موتور مطمئن شد گشتاور مورد نیاز سیستم در سرعت و فرکانس مورد نیاز تامین شود. در شکل 47 نمودار گشتاور-سرعت موتور مدل RK566BC نشان داده شده است همانطور که مشاهده میشود در فرکانس مورد نظر(10K) گشتاور تقریبا 1 نیوتن-متر است
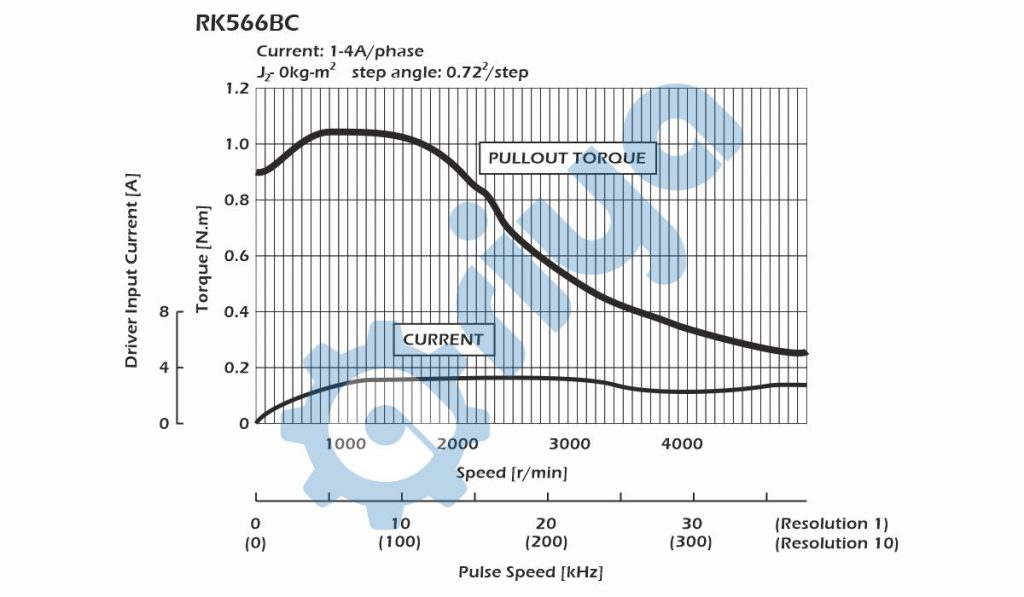
شکل 47:نمودار گشتاور-سرعت موتور مدل RK566BC
که از گشتاور مورد نیاز بیشتر است.
مرحله ششم:بررسی نرخ شتابگیری موتور و نسبت لختی
هر دو پارامتر در موتور انتخابی باید بالاتر از مقادیر سیستم باشد در قدم اول نرخ شتابگیری (TR) را بدست میآوریم.
در کاتالوگ موتور انتخابی مقدار TR برابر 48 است که از مقدار محاسبه شده برای سیستم بیشتر است بنابراین میتوان از این موتور استفاده نمود.
در قدم دوم نسبت لختی را بهدست میآوریم که از تقسیم لختی کل (JL) بر لختی رتور (J0) به دست میآید.
