
طراحی و ساخت کنترل ولو
شرکت آریا فرتاک نویان با مهندسانی مجرب و با تجربه توانسته است با طراحی و ساخت کنترل ولو ، عملگرهای الکترو مکانیکی و پوزیشنرهای پنوماتیک در بازار صنایع کشور در زمینه داخل سازی کنترل ولو وارد شده و موفق عمل کند. در ادامه توضیحاتی در خصوص انواع کنترل ولو با توجه به نوع عملگرهای آنها آورده می شود.
چهار مدل شیر کنترل ولو از نظر سیستم کنترلی عملگر آنها وجود دارد. در شکل زیر انواع سیستم کنترل عملگر شیرهای کنترلی، نشان داده شده است.

عملگرهای نیوماتیکی
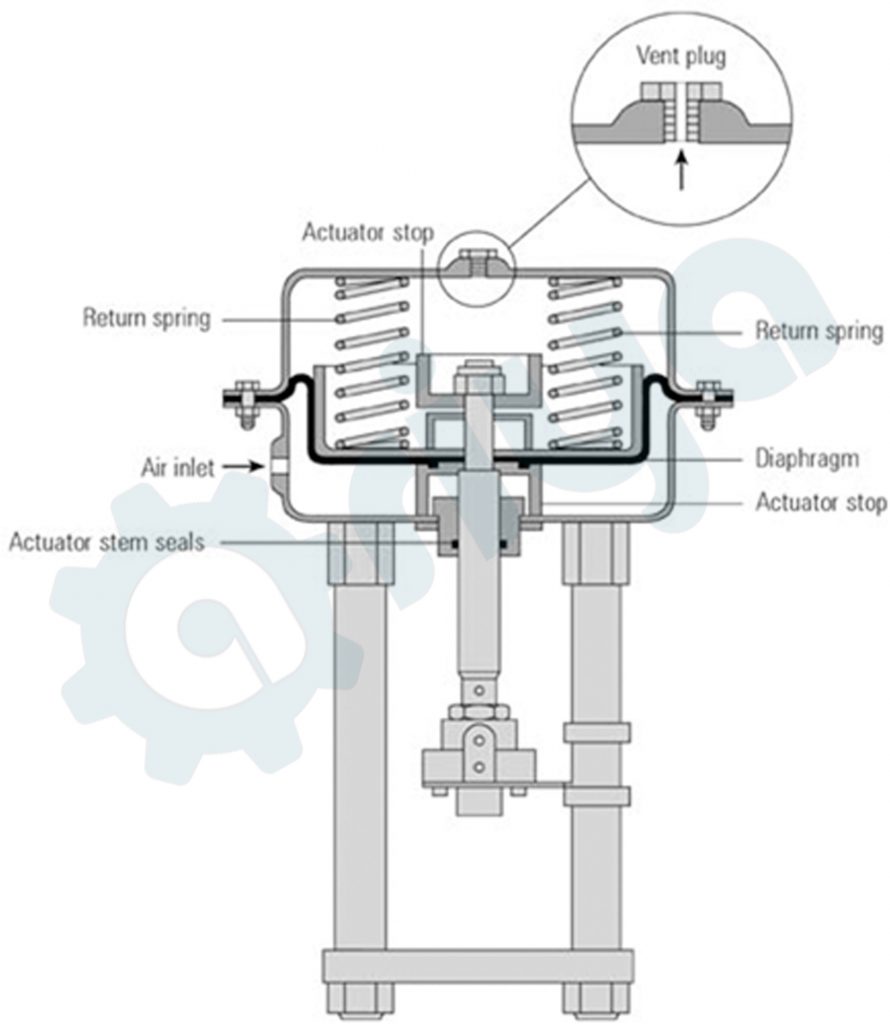
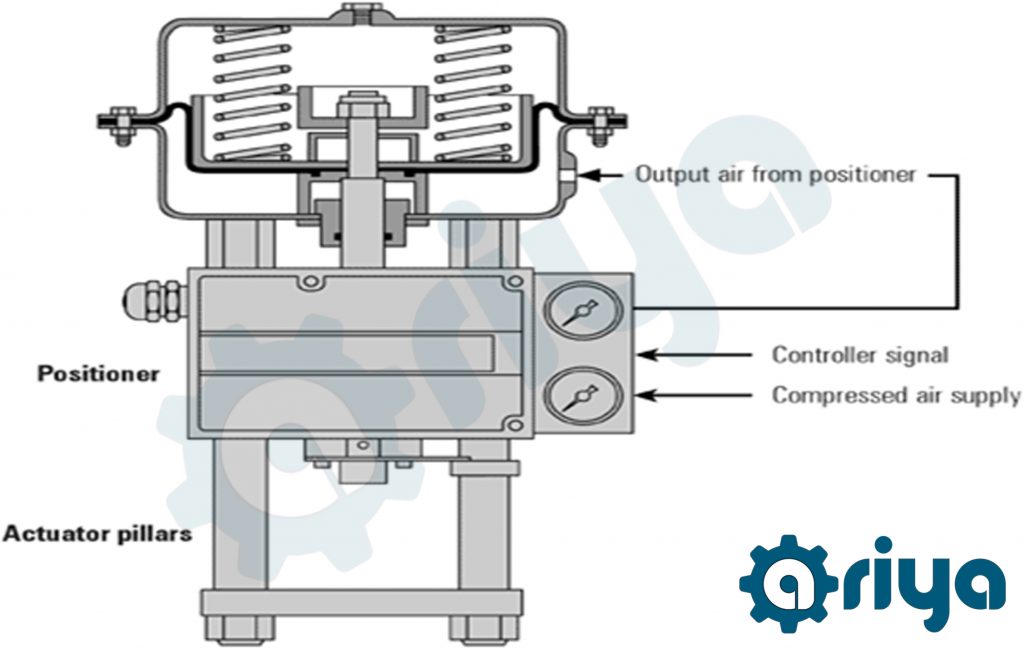
معمولا 70 درصد فروش محصولات شیرهای کنترلی از این دست میباشد. در شکل زیر این نوع عملگر نشان داده شده است. قابلیت اطمینان از عملکرد این نوع عملگرها به نسبت شیرهای دیگر بالاتر است. برای عملکرد آنها احتیاج به نیروی کمتری است و سختی کمتری نسبت به شیرهای دیگر دارند. این عملگرها احتیاج به منبع هوا (معمولا منبع هوای ابزار دقیق با فشار 6 تا 7 بار دارند). این نوع عملگرها با استفاده از Positioner جایگاه شیر را تنظیم میکنند. Positioner حرکت شیر در مسیر درست و موقعیت صحیح نهایی تضمین میکند و استفاده از آن به منظور داشتن دقت بالاتر است کنترل ولو.
معمولا از عملگرهای نیوماتیکی استفاده می شود و نسبت به عملگرهای الکتریکی و هیدرولیکی ارزان قیمت تر می باشد.به جز موارد زیر:
هوای ابزاردقیق نباشد.
قدرت بیشتری لازم باشد.
Stroke Time بالاتری نیاز باشد.
اختلاف دمای شب و روز زیاد باشد.
عملگرهای نیوماتیک می تواند پیستونی و یا دیافراگمی ((spring return باشد. عملگرها می تواند بنا به وضعیتی که فرآیند در P&ID مشخص می کند در زمان fail در سه حالت FC, FO, FL باشد:
Close (fail close)
Open (fail open)
Locking last position
در نوع دیافراگمی هوا تنها از یک طرف وارد می شود و برای vent مسیر تخلیه دارد. معمولا فشارهای 3-15 psi و یا 6-30 psi به actuator دیافراگمی وارد می شود و فشارهای بالاتر برای نوع دیافراگمی مناسب نیست و نوع پیستونی انتخاب گردد. ترجیح طراح به جز مواردی که فشار جواب ندهد انتخاب ولو دیافراگم می باشد، البته برای ولوهای on/off باید از نوع پیستونی استفاده نمود.
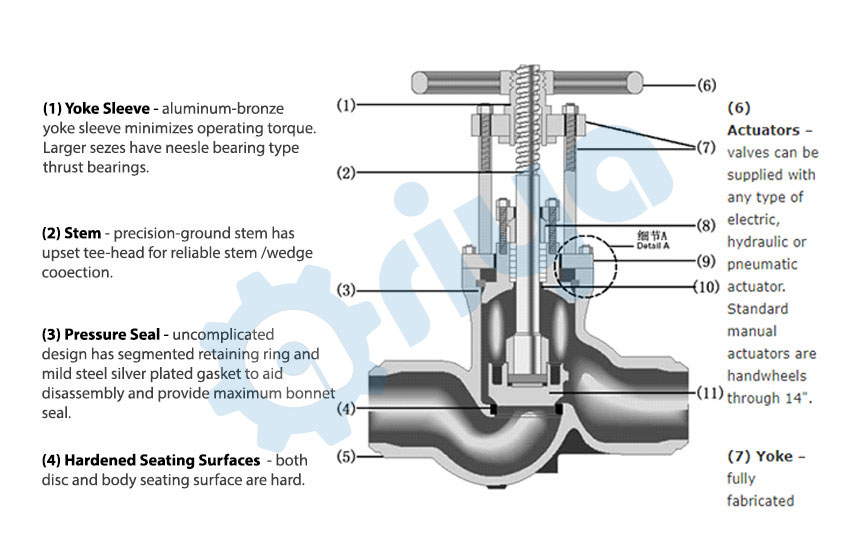
در شکل بالا 1 و 7 قطعه ای بنام yoke را نشان می دهد که actuator (شماره 6) را به شیر وصل می کند. Yoke متریال خاصی لازم ندارد و می تواند چدن باشد. Stroke time تا کنترل ولو 4 اینچ باید کمتر از 5 ثانیه باشد و برای بزرگتر از 4 اینچ به ازای هر اینچ یک ثانیه اضافه می شود. برای مثال برای ولو 6 اینچ این زمان 6 ثانیه می باشد.
برای فشارهای بالاتر از نوع پیستون استفاده می شود. پیستونها در مدلهای spring و spring less می باشد. در نرم افزارهای انتخاب عملگر معمولا نیروهای:
نیروی اصتکاک Packing
مقدار اختلاف فشار shut off
Seat load
Balance و یا unbalance بودن ولو: در زمانیکه شیر full close است عملگر بیشترین نیرو را لازم دارد. در ولوهای balance نیروی کمتری برای جا به جا کردن پلاگ لازم است در این نوع کنترل ولوها سوراخهایی روی ولو وجود دارد که باعث می شود بتوان از نیروی شناوری برای بالا بردن پلاگ در زمان باز کردن ولو استفاده نمود. البته باید از سیالی استفاده شود تا سوراخها را مسدود ننماید.
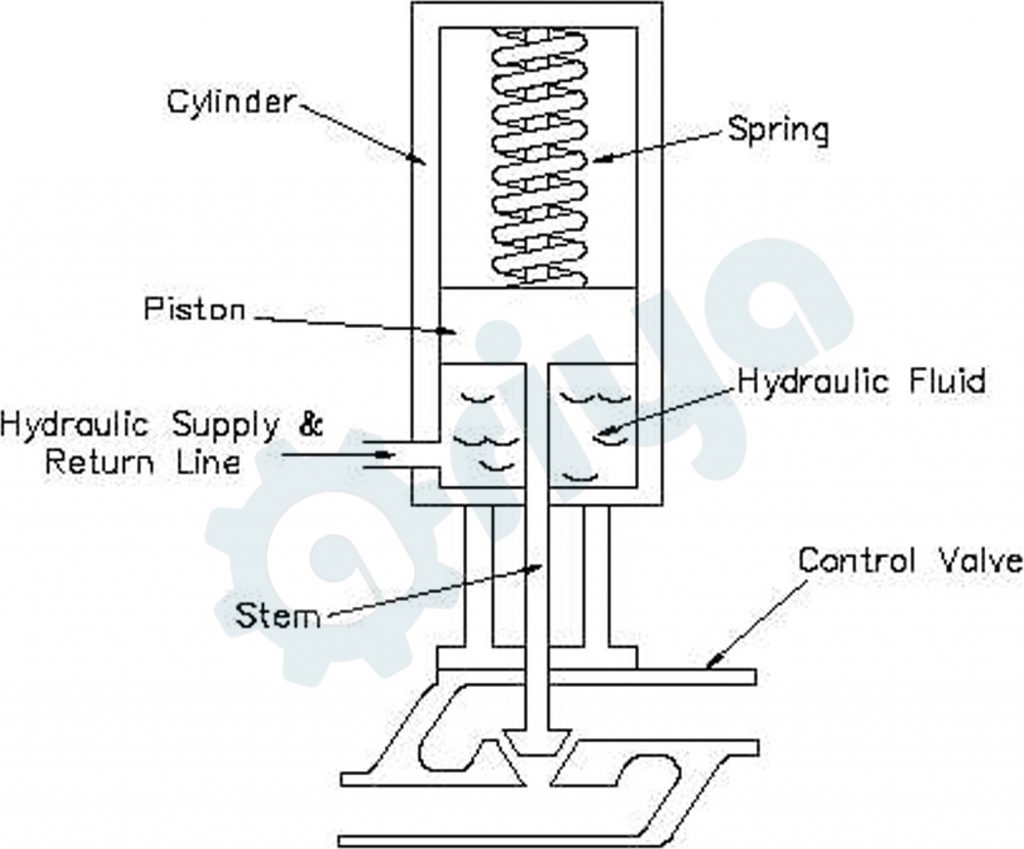
عملگرهای هیدرولیکی
این عملگرها سریع و در عین حال بسیار محکم و قدرتمند هستند، اتلاف انرژی در این نوع عملگرها زیاد است. روغن و مایع کنترلی این عملگرها سمی میباشد و امکان نشتی و آلودگی محیط زیست توسط آنها زیاد است، از طرفی تعمیرات آنها بسیار مشکل است.
عملگرهای الکتریکی
در این نوع عملگرها از سوئیچهای حدی برای نقاط ابتدایی و انتهایی و میانی مسیر استفاده میگردد، همچنین از یک سنسور نشان دهنده موقعیت و درصد باز وبسته بودن شیر مانند پتانسیومتر استفاده میشود. در شکل این نوع عملگرها نمایش داده شدهاند و همچنین مبدل حرکت دورانی به حرکت خطی نشان داده شده است. همانطور که مشاهده میشود حرکت دورانی میتواند از طریق اتوماتیک (موتور) و یا از طریق دستی به کلاچ اعمال شده و به حرکت خطی تبدیل شود. تبدیل حرکت دورانی به خطی در شیر میتواند از طریق موارد زیر باشد:
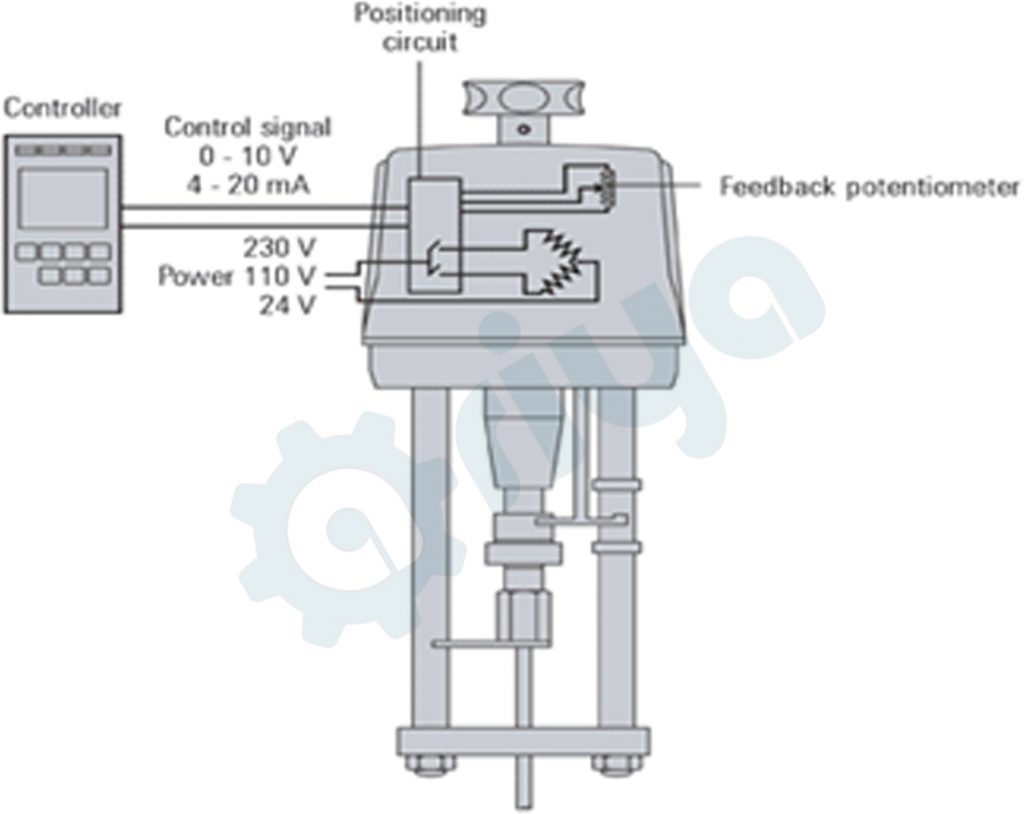
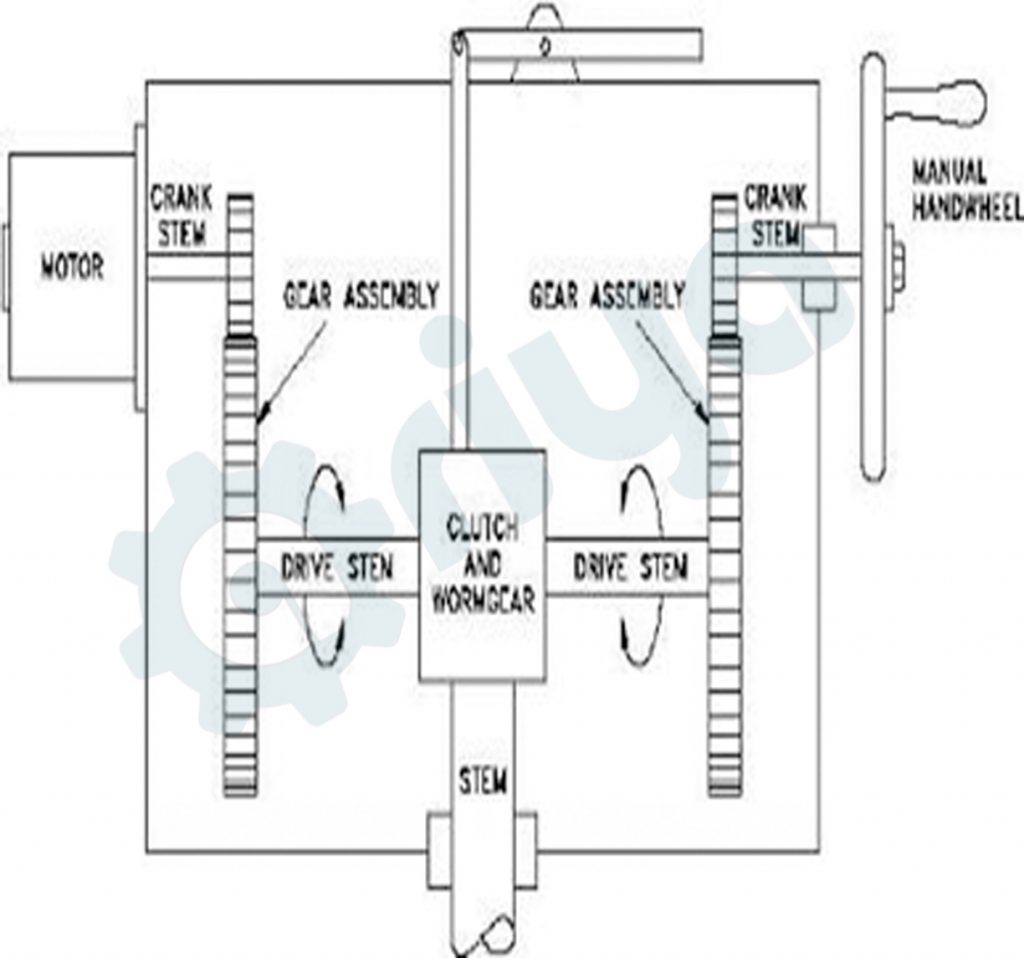
جعبه ترمینال و خروجی سیگنال مکان شیر، موتور الکتریکی، دسته برای چرخش شیر به صورت دستی، مکان نصب کلاچ و گیربکس، دسته جدا کننده حالت دستی از حالت موتوری، نمایش مکان شیر در محل و مکان نصب شیر به پروسس نمایش داده شده است.

عملگرهای الکتریکی باید دارای خصوصیات زیر باشد:
-
اصطکاک حرکتی شیر تاثیری در آن نداشته باشد
-
بتواند فرمانهای حلقه کنترل بسته را به سرعت دنبال کند.
-
زمان مرده، تاخیر زمانی و فراجهش در نوع عملگرها نباید وجود داشته باشد.
-
گشتاور باید به صورت کاملا پیوسته تغییر کند (دوره کاری نباید داشته باشد).
- کنترل ولو
-
پاسخ دهی به فرمان باید بسیار سریع باشد.
-
عمر قطعات به کار رفته در آنها باید طولانی باشد و احتیاج به تعمیرات نداشته باشند.
عملگرهای سروو الکتریک
عملگرهای سرووهیدرولیک مشابه عملگرهای الکتریکی عمل میکنند با این تفاوت که در عملگرهای سروو از سروو موتور استفاده میشود. تفاوت این سیستم با موتورهای معمولی استفاده از سنسور مکان در داخل موتور برای ارتباط با سروو درایو است. سروو درایور این موتورها باید با سروو موتور و سنسور مکان داخلی آن سازگار باشد و در هر لحظه از مکان موتور اطلاع داشته باشد. این درایورها قابلیت محاسبه مکان، سرعت و گشتاور سروو موتور در هر لحظه را دارند و با در نظر گرفتن این اطلاعات و سیگنال کنترلی وارد بر درایور در هر لحظه ولتاژ قدرت مناسب به سروو موتور ارسال میگردد.
معیارهای طراحی برای عملگرهای شیر صنعتی
معیارهای طراحی برای عملگرهای شیر صنعتی شامل موارد زیر است:
-
در برابر انواع شوکها مقاوم باشد.
-
سرعت بالا
-
دقت مکانی بالا
-
پاسخ سریع
-
سختی مکانیکی بالا
-
قیمت مناسب
-
بازده بالا
-
سایز کوچک
-
تعمیرات کم
-
عایق بندی کامل
-
طراحی های همزمان خطی و چرخشی داخلی
-
دارای قیدبک مکانی